5 - 16 5 - 16
MELSEC-Q
5 SETUP AND PROCEDURES BEFORE OPERATION
[Switch 3] Zero signal input logic selection, rotation direction setting
<Zero signal input logic selection>
Set the zero signal (PG0) input logic according to the externally connected
device.
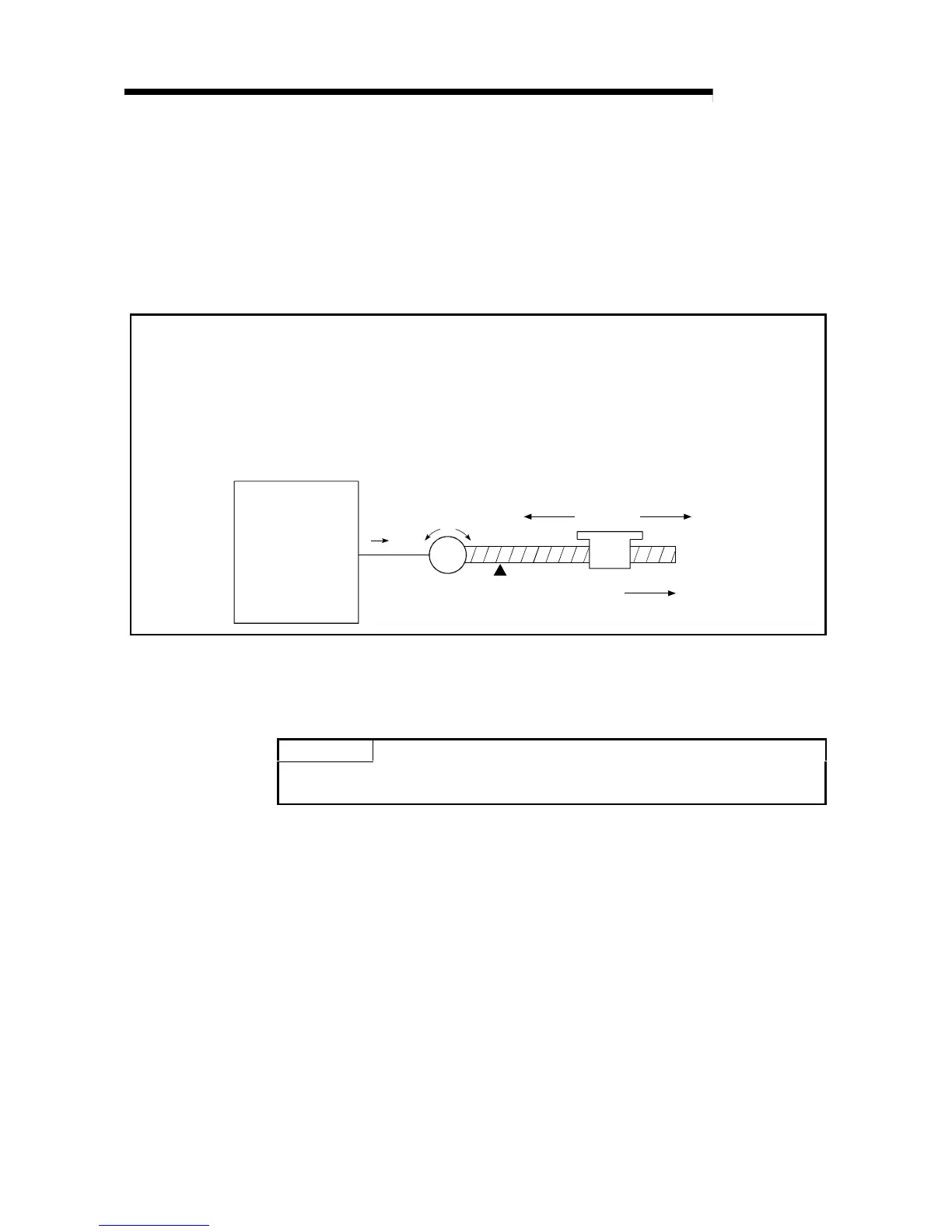
<Rotation direction setting>
Set the relation of the motor rotation direction and current value address
increment/decrement.
[Setting procedure]
1) Set "0", and carry out forward run JOG operation.
("0" is set as the default value.)
2) When the workpiece "W" is moving toward the address increment direction, the current setting is O.K.
When the workpiece "W" is moving toward the address decrement direction, set "1".
3) Carry out forward run JOG operation again, and if "W" moves toward the increment direction, the
setting is complete.
M
QD70
Motor
Workpiece
W
3)
Forward run pulse
Address decre-
ment direction
Address incre
ment direction
OP
1)
2)
[Switch 4] Near-point dog signal input logic selection
Set the near-point dog signal (DOG) input logic according to the externally
connected device.
Important
Incorrect setting of any I/O signal logic may disable normal operation. Make the
setting carefully when changing the initial setting.
 Loading...
Loading...