OMEM710 Hardware Manual 2v11
16
To calibrate your sensor, see the calibration of the coolant temperature sensor.
Air Temp Fail Low and Hi are the failure points of the sensor and should be set to just within the
reading limits of the sensor.
Example- If the lowest temperature in the sensor table is –25 then Air Temp Fail Low should be set
1 higher at –24. If the highest temperature in the sensor table is 125 then Air Temp Fail Hi should
be set 1 lower to 124. Air Temp Default is the temperature to which the input defaults if the sensor
goes into failure.
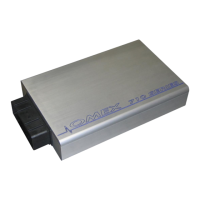
5.6 Barometric Pressure
As the air pressure changes, so does the amount of oxygen per volume of air. Changes in most
countries are relatively little, but if driving in large mountain ranges, these changes can be
significant. The 710 ECU has an in-built 1bar MAP sensor which may be used for barometric
correction. As the 710 has an inbuilt sensor, no calibration is required, the function is simply enabled
or disabled. Baro must NOT be checked if using the internal sensor for load. There is a Baro Source
option to allow the use of external baro sensors where required.
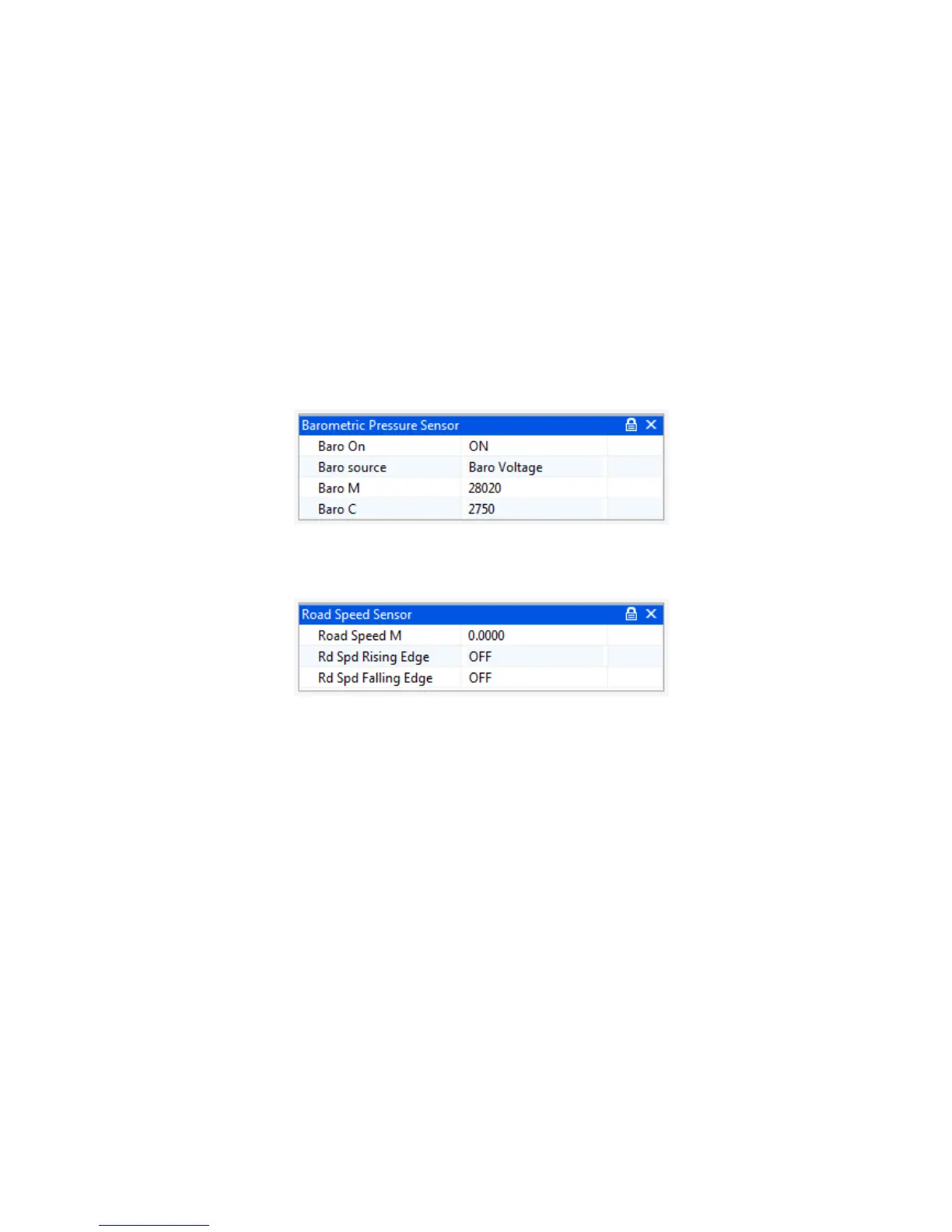
5.7 Road Speed Sensor
The road speed sensor is only required if you wish to use gear dependent shift light speeds. The
input should be a pre-differential driven wheel input e.g. propshaft rpm.
The road speed sensor can only be calibrated once the engine is running.
The option Road Speed M is a scalar and should be adjusted until the parameter Road Speed
reads the current road speed.
Rd Spd Falling Edge and Rd Spd Rising Edge specify the edge of the input waveform from the
sensor to use as the significant edge. Typically Rd Spd Falling Edge.
Road speed can be displayed as either mph or kph. To adjust the units used go to Configure |
Units/Scaling | Road Speed Units.
Jumper
To allow for different types of sensor, physical jumpers need to be set. The following diagram shows
an aerial view of the ECU board with the main wiring connector on the right-hand side.