5-55
5-10 User Parameters
5
Operating Functions
Sequence Parameters
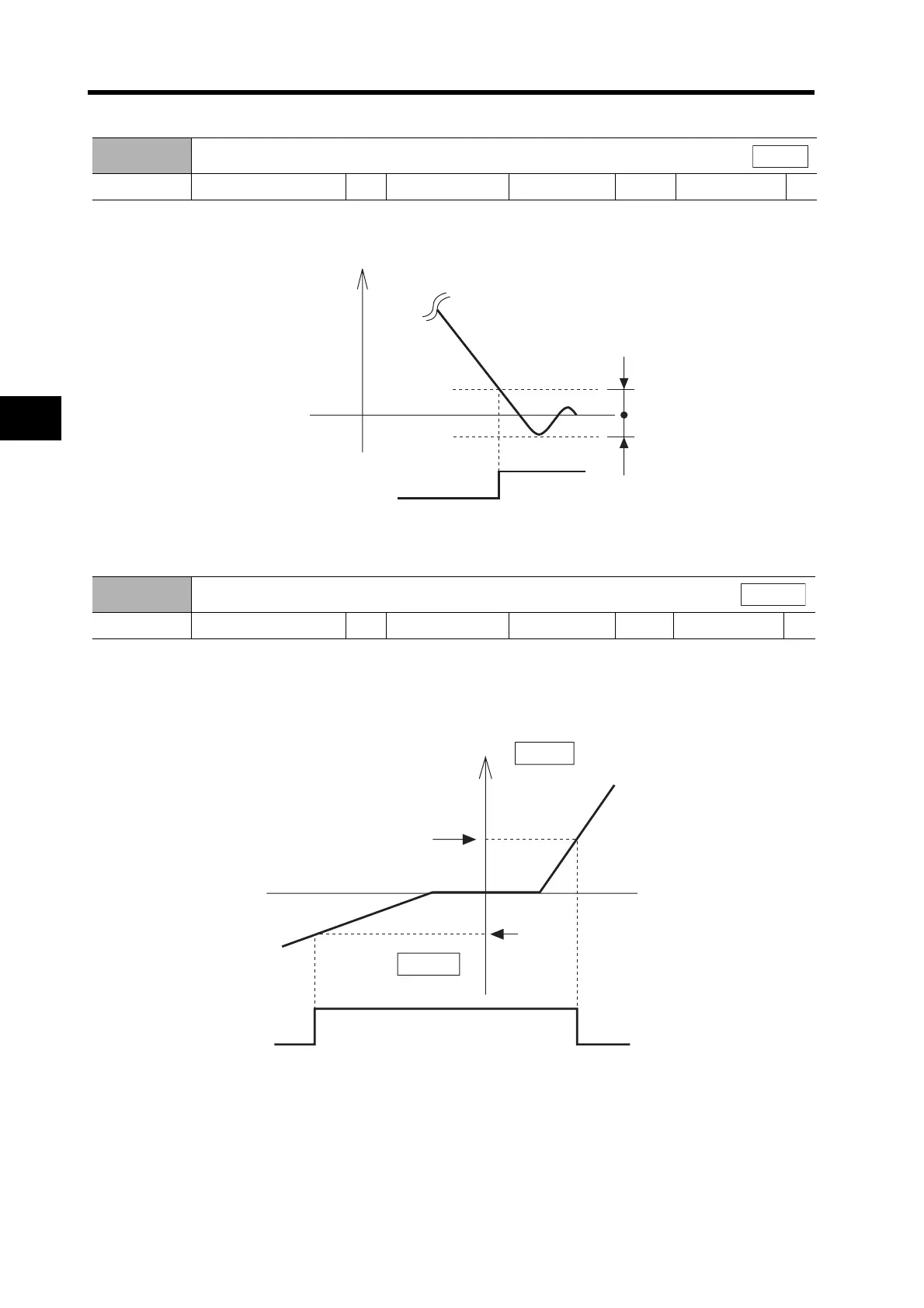
Set the deviation counter value for the Positioning Completed Output (INP).
The Positioning Completed Output (INP) turns ON when the accumulated pulses in the deviation
counter fall below the setting of this parameter.
The encoder resolution is 2,500 pulses/rotation, but in the Servo Drive it is regarded as 10,000
pulses/rotation (i.e., 2,500 pulses/rotation × 4).
Set the number of rotations for the warning output (zero speed detection output).
The Warning Output Selection (Pn09) must be set to 1 to output zero speed detection.
Zero speed detection will be output if the Servomotor speed falls below the set speed regardless
of the direction of rotation.
There is an hysteresis of 10 r/min, so set a value higher than 10.
Pn60
Positioning Completion Range
Setting range 0 to 32767 Unit Pulse Default setting 25
Power OFF → ON
---
Position
Accumulated
pulses
Pn60
Pn60
INP
Pn61
Zero Speed Detection
Setting range 0 to 20000 Unit r/min Default setting 20
Power OFF → ON
---
All modes
Speed
Reverse
WARN
Pn61
Pn61
Forward