8. Hardware Specification
8.1. Technical Sheets
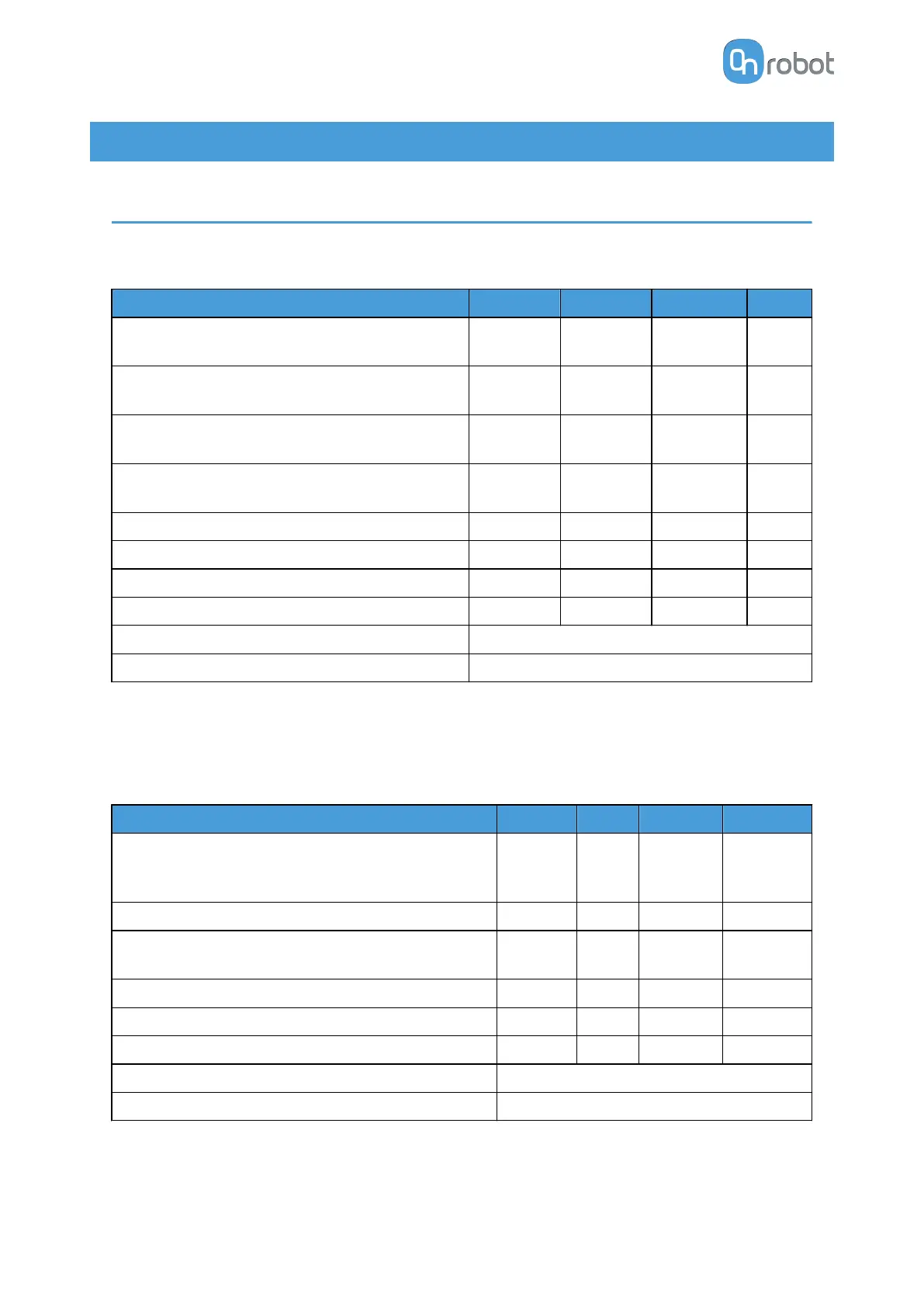
8.1.1. 2FGP20
Finger Grip Properties Minimum Typical Maximum Unit
Payload
-
-
-
-
20
44.1
[kg]
[lb]
Total stroke
-
-
260
10.24
[mm]
[inch]
Grip width range *
170
6.69
-
430
16.93
[mm]
[inch]
Gripping repeatability
-
-
+/- 0.5
+/- 0.0197
-
-
[mm]
[inch]
Gripping force ** 80 - 400 [N]
Gripping force tolerance - - +/- 30 [N]
Gripping speed *** 16 - 180 [mm/s]
Gripping time (including brake activation) - 600 - [ms]
Hold workpiece if power loss? Yes
Motor Integrated, electric BLDC
* When pads are mounted, the minimum value is 158 mm and the maximum value is 418 mm.
** See Force vs Current Graph
*** At 6 mm stroke and 150 N. The typical value is 900 ms at 20 mm and 200 N.
Vacuum grip properties
Minimum Typical Maximum Unit
Vacuum
5
- 0.05
1.5
-
-
-
60
- 0.607
17.95
[%Vacuum]
[Bar]
[inHg]
Air flow 0 12 [L/min]
Payload (with delivered attachments)
-
-
2.5
5.51
[kg]
[lb]
Vacuum cups 1 4 [pcs]
Gripping time (measured with vacuum target 40 %) 0.25 [s]
Release time 0.4 [s]
Vacuum pump Integrated, electric BLDC
Dust filters Integrated 50 µm, field replaceable
HARDWARE SPECIFICATION
58