Set the Linear oset (X,Y,Z) and the Rotation in RPY (Roll-Pitch-Yaw) values to adjust the
OnRobot device dependent calculated TCP.
5.1.1.2. 2FGP20
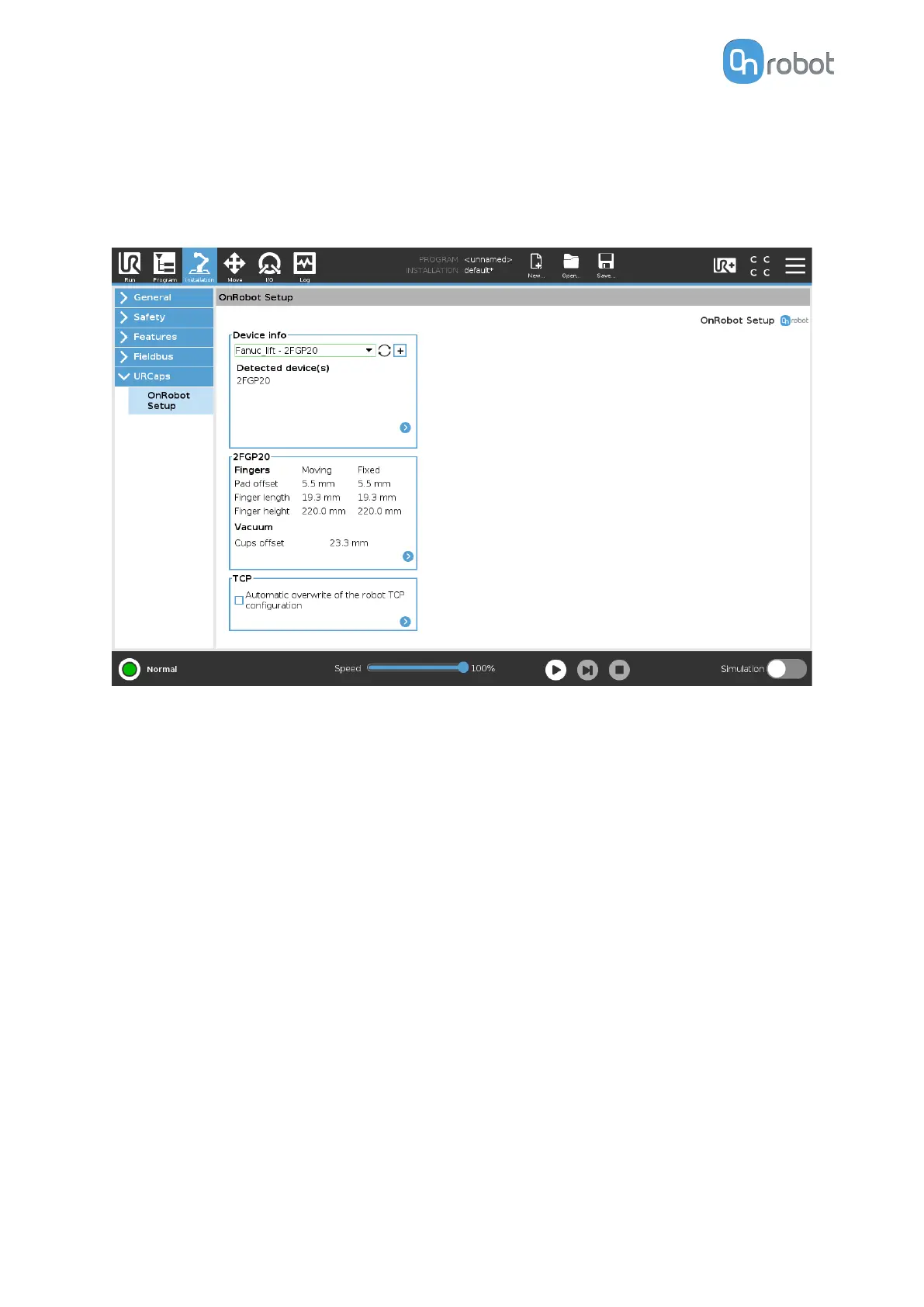
The configuration panels for the 2FGP20 are shown in the images below:
2FGP20
In the normal view of the panel, the selected Pad oset, Finger length, Finger height and
Vacuum cups oset are shown. These values can be set for both the Moving finger and the
Fixed finger.
SW INSTALLATION
24