General properties Minimum Typical Maximum Unit
Storage temperature 0
32
-
-
60
140
[°C]
[°F]
IP Classification 54
Dimensions [L x W x D]
400 x 121.6 x 188
15.75 x 4.79 x 7.4
[mm]
[inch]
Weight - Base unit without fingers or cups
3.7
8.16
[kg]
[lb]
Weight - With fingers, pads on one finger, bracket for
cups and cups
5.2
11.46
[kg]
[lb]
Operating Conditions Minimum Typical Maximum Unit
Power supply 20 24 25 [V]
Current consumption - - 2000 [mA]
Operation temperature
5
41
-
-
50
122
[°C]
[°F]
Relative humidity (non-condensing) 0 - 95 [%]
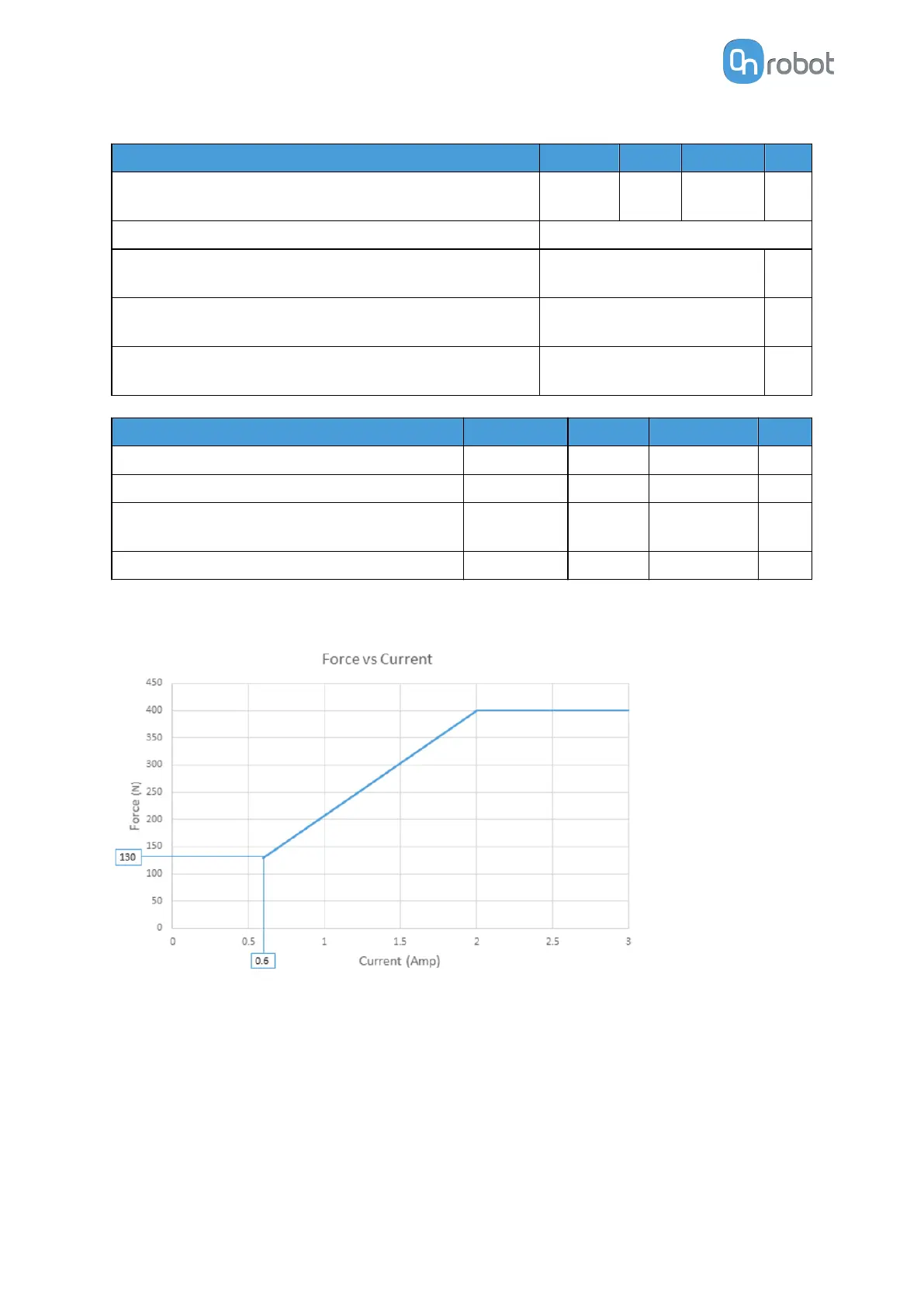
Force vs Current Graph
Force Sensor
The gripper has a force sensor in the moving finger as shown in the figure below.
HARDWARE SPECIFICATION
59