-13-
6-8
Sensor detection conditions
Caution
* The following cases may occur due to the sensor’s characteristics.
• The sensor may not work properly if it is installed in a location that does not meet the installation
conditions.
• The sensor may not work correctly if it is not installed in accordance with the instructions in this manual.
• Pedestrians, bicycles, or any large object (especially metal) entering the detection area may be detected.
• Depending on the position and/or direction of vehicle approach, the distance to be detected may
become shorter or may not be detected.
• Performance of the sensor may be affected if:
• The sensor pole is not vertical from the ground
• The sensor surface is covered with ice, snow,
chewing gum, dirt, etc.
• A sensor unit is frozen
• Snow has accumulated over a specified height
in the sensor’s detection area
• It is raining heavily
• Water splash is on a sensor
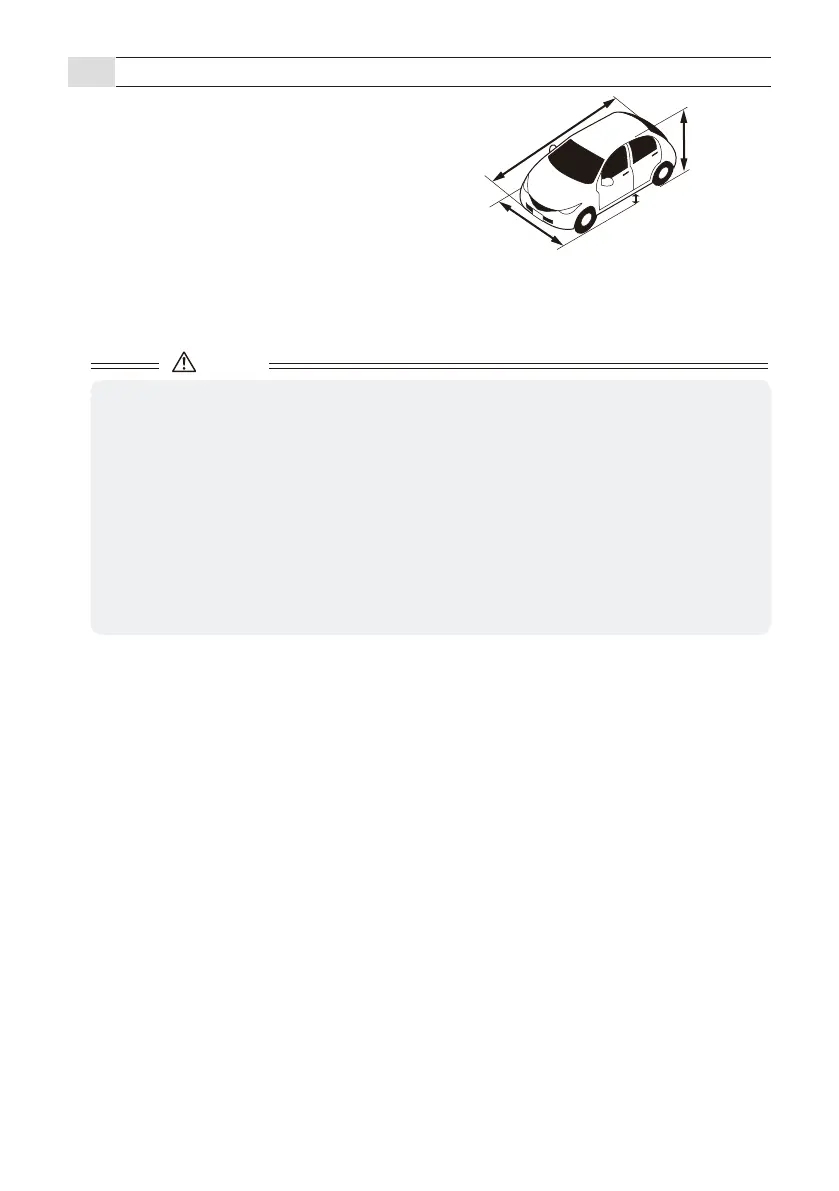
• Below are the conditions that vehicles must satisfy to be detected by the sensor.
Vehicle length: 3300mm (130in.) or more,
5000mm (197in.) or less
Vehicle width: 1400mm (55in.) or more,
1900mm (75in.) or less
Vehicle height: 1200mm (47in.) or more,
2100mm (83in.) or less
Minimum ground clearance: 150-250mm (6-10in.) or more
Total vehicle weight: 2.5t (5512lb.) or less
• Vehicles approaching at 2–35km/h (1.2–22mi/h) are detected.
3300–5000mm
(130–197in.)
150-250mm (6-10in.)
1200–2100mm
(47–83in.)
1400–1900mm
(55–75in.)
2.5t
(5512lb.)
or less