-3-
• This sensor uses the reflection of microwave to detect vehicles.
• The microwave sensor uses FMCW technology to detect the presence of a vehicle.
2-1
Detection principle of the sensor
2-2
Sensor operation
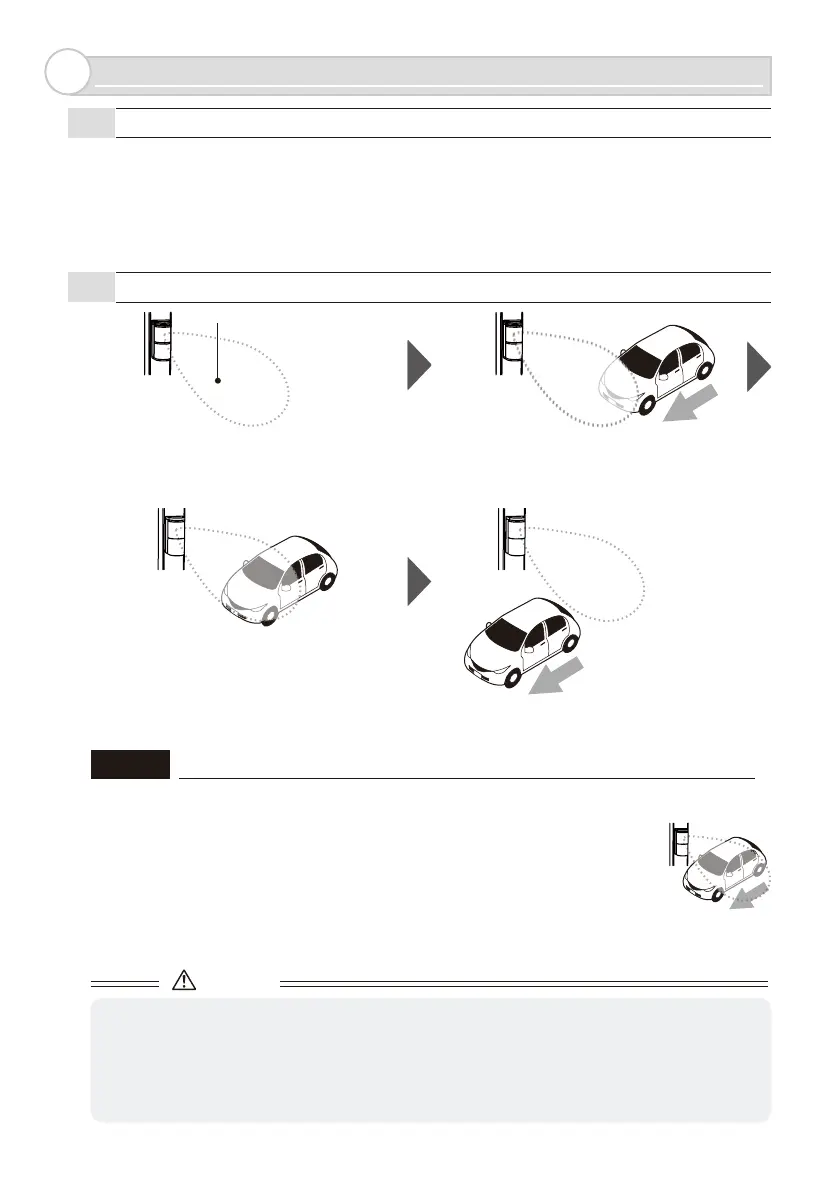
Detection area
Non-detection Detection
Detection Non-detection
The sensor is a non-detection status when the
vehicle is not in the area.
When a vehicle enters the detection area, the sensor
will change to a detection status.
Before using the product
2
When the vehicle leaves the detection area, the sensor
will change to a non-detection status.
Caution
* The following situations may occur due to the sensor detection principles.
• If a pedestrian or an object is in the detection area after a vehicle leaves the area, the sensor will
maintain the detection status. The sensor may not change to (or have less of a tendency to change to)
non-detection status due to flags, banners, tall weeds, etc.
• If one vehicle tailgates another vehicle very closely when entering the detection area, they may be
recognized as a single vehicle.
When a vehicle remains in the detection area,
the sensor holds a presence “Detection” status.
Differences due to vehicle direction
The direction that a vehicle is moving with regards to the sensor affects the
detection capability.
Refer to “Sensor Installation Conditions” (pp. 9–11), and install it correctly.
Parameters must be adjusted depending on the installation angle, so make
sure to install it correctly.
It may be difficult to detect a vehicle that suddenly enters the detection area
from a blind angle.
NOTE