9.4 Pulse Output Function
9.4.1 Overview of Pulse Output Function
Instructions used and controls
Together with a commercially available pulse-string input type motor driver, the pulse output function can
be used for positioning control.
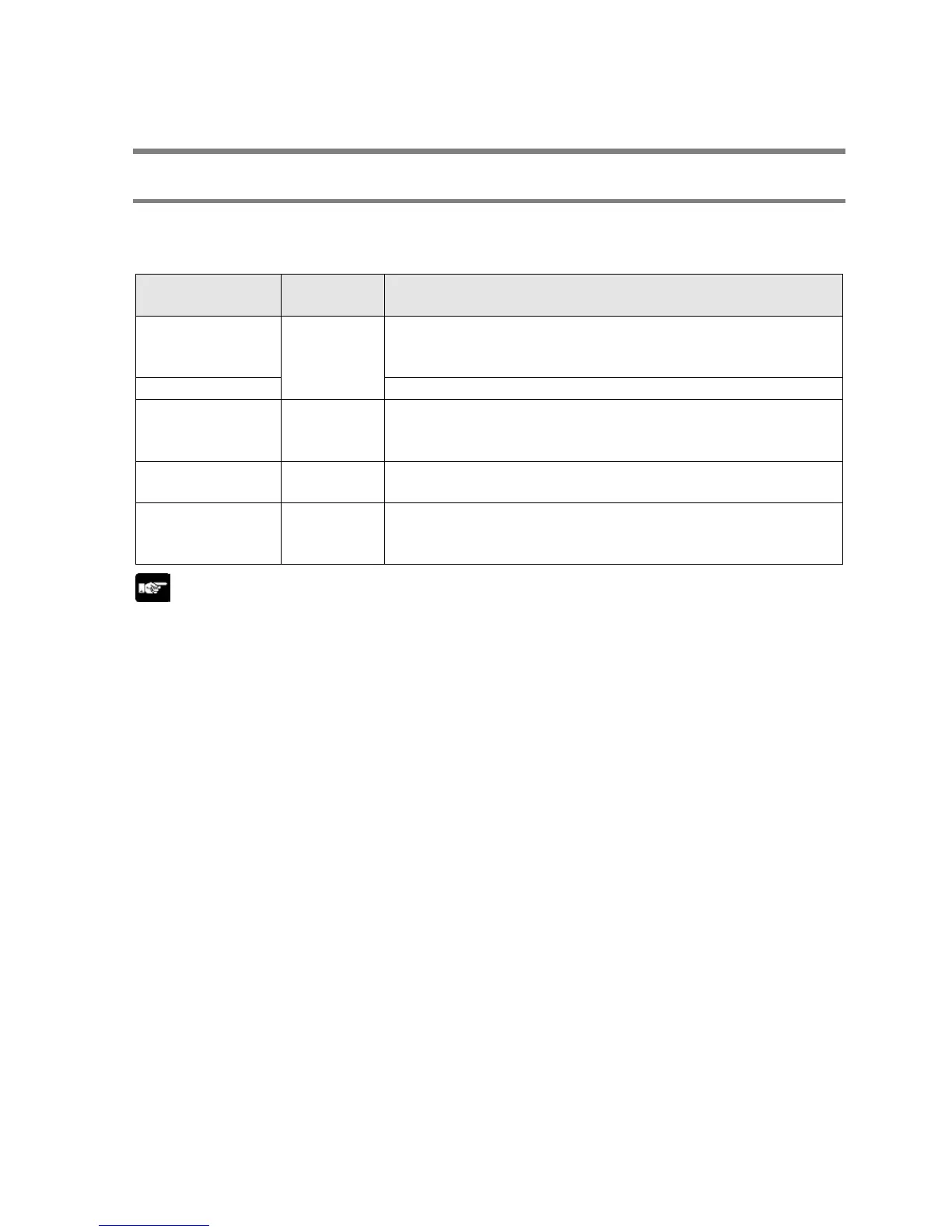
Type of control
Exclusive
Description
Trapezoidal
control
F171
(SPDH)
Provides trapezoidal (table-shaped) control for automatically
obtaining pulse outputs by specifying the initial speed, maximum
speed, acceleration/deceleration time and target value.
Enables automatic home return operation.
JOG operation
F172
(PLSH)
Causes pulses to be output as long as the execution condition is
on. A target value can also be set, so that pulse output stops at
the point when the target value is matched.
Data table
Enables positioning control in accordance with the data table.
Linear
interpolation
F175
(SPSH)
Enables pulses to be output using linear interpolation control, by
specifying the composite speed, the acceleration/deceleration
time, and the target value.
Note:
• With the Tr type, the CPU output is used to perform the pulse output function.
The pulse I/O cassette (AFPX-PLS) cannot be used.
Setting the system register
When using the pulse output function, it is necessary to set the system register No. 402.
When performing the home return by F174 (SPDH) instruction, the home input should be specified in the
system register No. 401.
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
 Loading...
Loading...