Appendix A
75
Commanded
Position
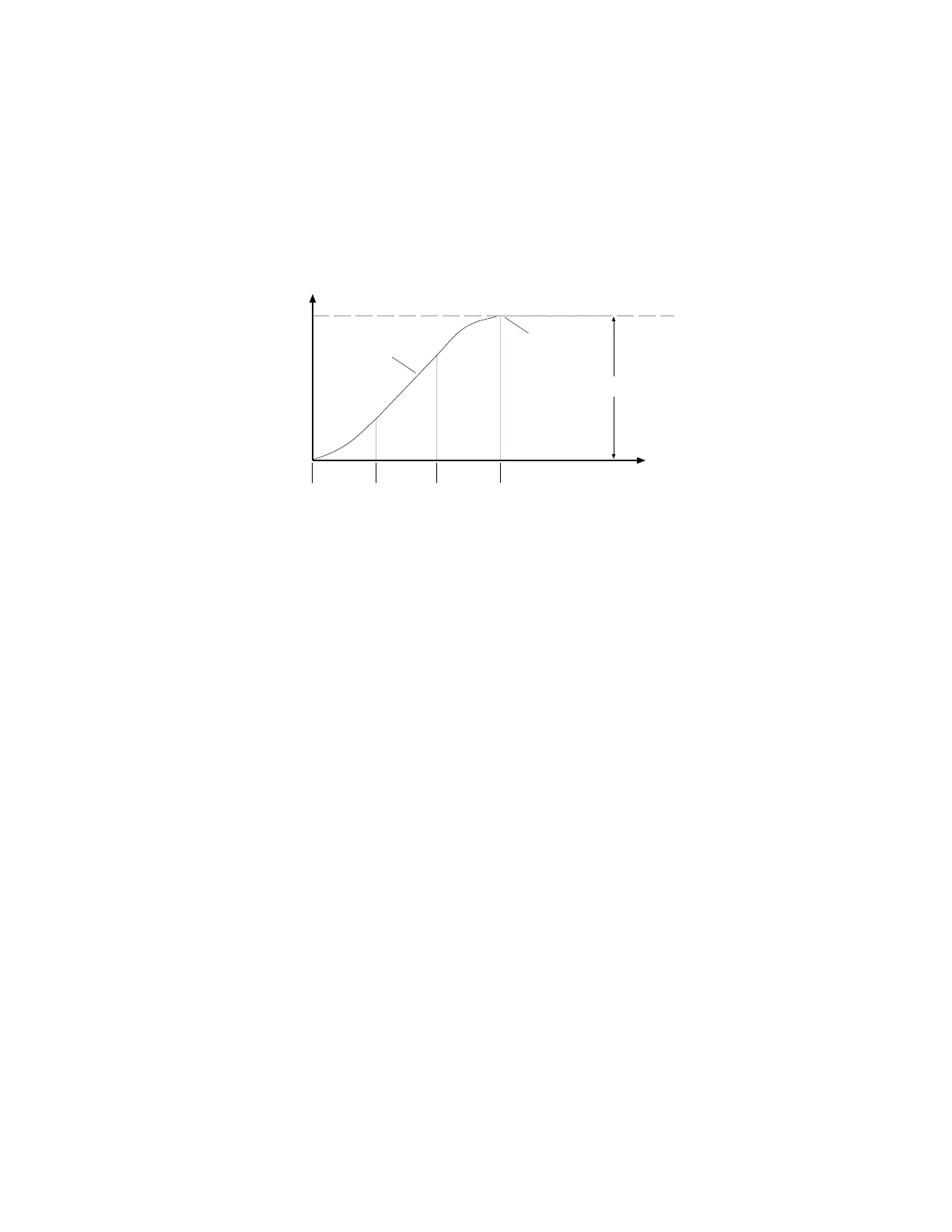
The commanded position is calculated by the motion profile routine based on the
acceleration (A, AA), deceleration (AD, ADA), velocity (V) and distance (D) command values and
it is updated every servo sampling period. Therefore, the commanded position is the intended
position at any given point of time. To view the commanded position, use the TPC (Transfer
Commanded Position) command; the response represents the commanded position at the
instant the command is received.
When this user guide refers to the commanded position, it means the calculated time-varying
commanded position, not the distance (D) command. Conversely, when this user guide refers
to the position setpoint, it means the final intended distance specified with the distance (D)
command. The following plot is a typical profile of the commanded position in preset (MCØ)
mode.
Setpoin
Distance
( D )
Acceleration
Constant
Velocity
Deceleration
Profile
Complete
Position
Time
Commanded
Position
Actual Position The other type of time-varying position information is the actual position; that is, the
actual position of the motor (or load) measured with the feedback device (resolver, encoder or
ANI input). Since this is the position achieved when the drive responds to the commanded
position, we call the overall picture of the actual position over time the position response
(see further discussion under Servo Response Terminology).
To view the actual position, use the TFB (Transfer Position of Feedback Device) command;
the response represents the actual position at the instant the command is received. The goal of
tuning the servo system is to get the actual position to track the commanded position as
closely as possible.
The difference between the commanded position and actual position is the position error.
To view the position error, use the TPER (Transfer Position Error) command; the response
represents the position error at the instant the command is received. When the motor is not
moving, the position error at that time is called the steady-state position error (see
definition of steady-state under Servo Response Terminology). If a position error occurs when
the motor is moving, it is called the position tracking error.
In some cases, even when the system is properly tuned, the position error can still be quite
significant due to a combination of factors such as the desired profile, the motor’s limitations,
the dynamic characteristics of the system, etc. For example, if the value of the velocity (V)
command is higher than the maximum velocity the motor can physically achieve, then when
it is commanded to travel at this velocity, the actual position will always lag behind the
commanded position and a position error will accumulate, no matter how high the gains are.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
 Loading...
Loading...






