76
APEX615n Installation Guide
Servo Response Terminology
Stability The first objective of tuning is to stabilize the system. The formal definition of system
stability is that when a bounded input is introduced to the system, the output of the system
is also bounded. What this means to a motion control system is that if the system is stable,
then when the position setpoint is a finite value, the final actual position of the system is also
a finite value.
On the other hand, if the system is unstable, then no matter how small the position setpoint
or how little a disturbance (motor torque variation, load change, noise from the feedback
device, etc.) the system receives, the position error will increase continuously (and
exponentially in almost all cases.) In practice, when the system experiences instability, the
actual position will oscillate in an exponentially diverging fashion as shown in the drawing
below. The definition here might contradict what some might perceive. One common
perception shared by many is that whenever there is oscillation, the system is unstable.
However, if the oscillation finally diminishes (damps out), even if it takes a long time, the
system is still considered stable. The reason for this clarification is to avoid misinterpretation
of what this user guide describes in the following sections.
Position Response
Types
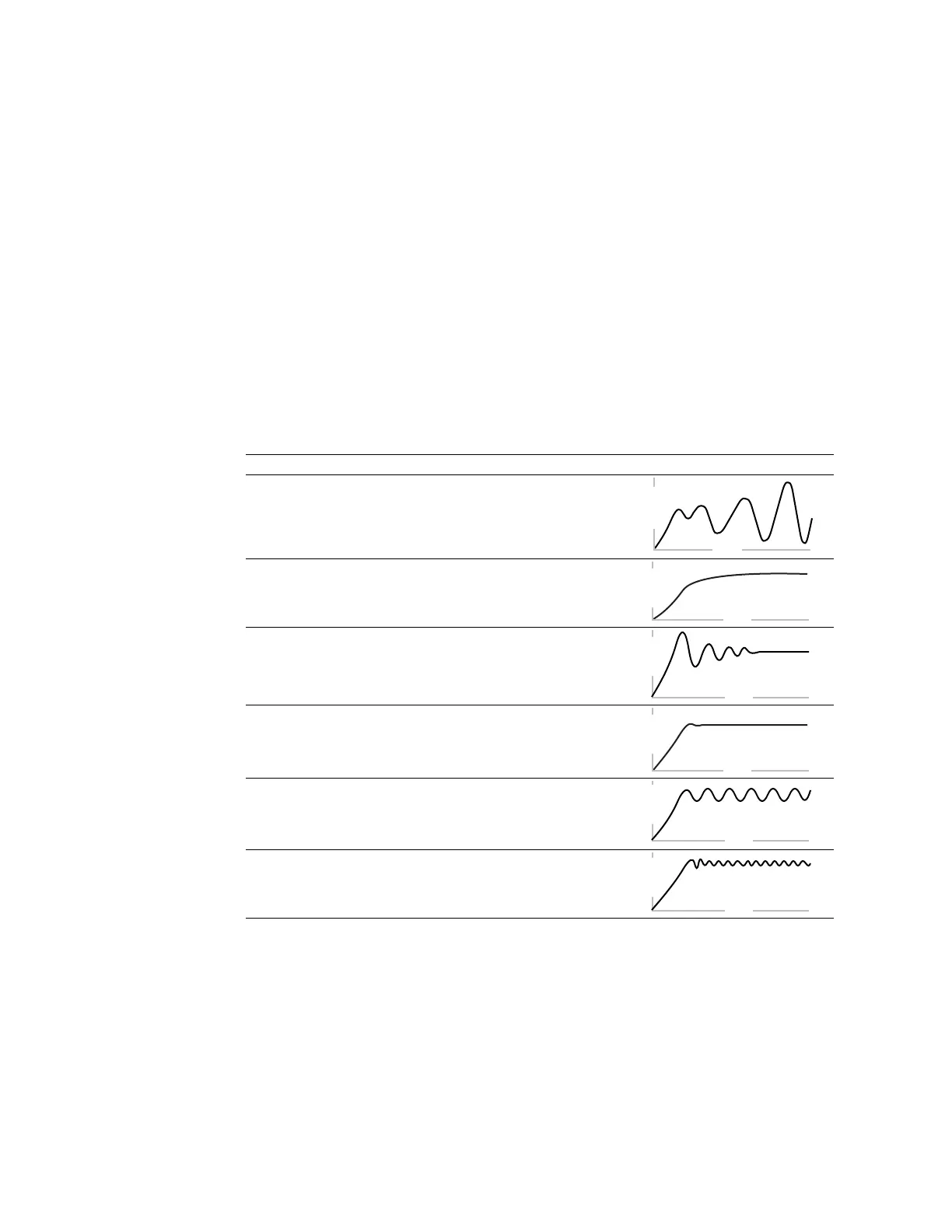
The following table lists, describes, and illustrates the six basic types of position responses.
The primary difference among these responses is due to damping, which is the suppression
(or cancellation) of oscillation.
Response Description Profile (position/time)
Unstable Instability causes the position to
oscillate in an exponentially diverging
fashion.
Position
Time
Over-damped A highly damped, or
over-damped
,
system gives a smooth but slower
response.
Position
Time
Under-damped A slightly damped, or
under-damped
,
system gives a slightly oscillatory
response.
Position
Time
Critically damped A critically-damped response is the
most desirable because it optimizes
the trade-off between damping and
speed of response.
Position
Time
Oscillatory An oscillatory response is
characterized by sustained position
oscillations of equal amplitude.
Position
Time
Chattering Chattering is a high-frequency, low-
amplitude oscillation which is usually
audible.
Position
Time
Performance
Measurements
When you investigate the plot of the position response versus time, there are a few
measurements that you can make to quantitatively assess the performance of the servo:
• Overshoot – the measurement of the maximum magnitude that the actual position
exceeds the position setpoint. It is usually measured in terms of the percentage of the
setpoint value.
• Rise Time – the time it takes the actual position to pass the setpoint.
• Settling Time – the time between when the commanded position reaches the setpoint
and the actual position settles within a certain percentage of the position setpoint. (Note
the settling time definition here is different from that of a control engineering text book,
but the goal of the performance measurement is still intact.)
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
 Loading...
Loading...






