Appendix A
77
These three measurements are made before or shortly after the motor stops moving. When it
is moving to reach and settle to the setpoint, we call such a period of time the transient.
When it is not moving, it is defined as steady-state.
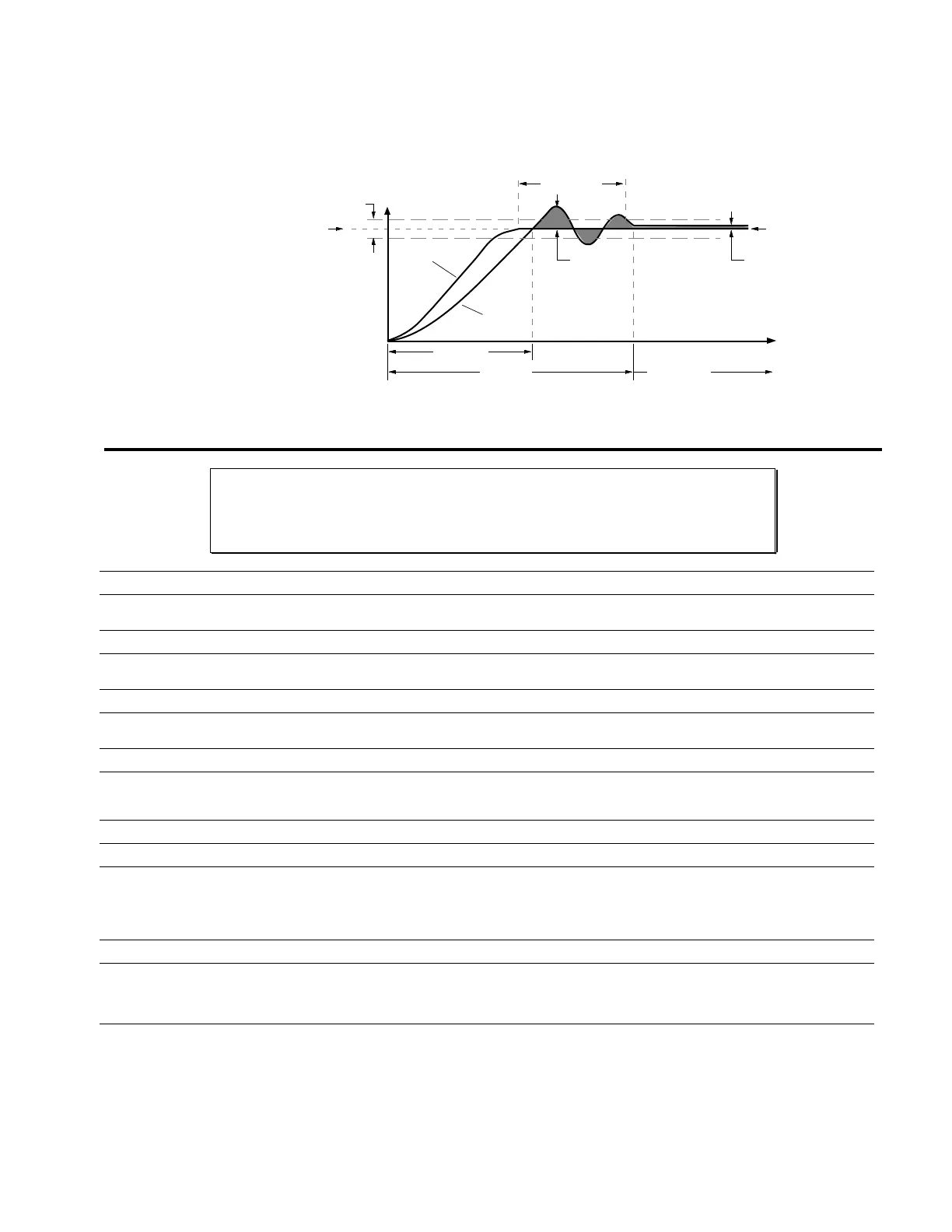
A typical stable position response plot in preset mode (MCØ) is shown below.
Setpoint
Commanded
Position
Actual
Position
Setpoint
Target Zone Mode
Settling Band
Rise Time
Transient
Settling Time
Overshoot Steady State
Position Erro
Steady State
Time
Position
6000 Series Servo Commands
NOTE
The following list briefly describes each servo-related 6000 Series command. More
detailed information can be found in the rest of this chapter and within each command’s
description in the
6000 Series Software Reference
.
Command Title Brief Description (detailed descriptions in
6000 Series Software Reference
)
SFB
Select Servo Feedback Source
Selects the servo feedback transducer. You can select resolver, encoder, or ANI
feedback. (SFB4, resolver, is the default selection.)
SGAF
Acceleration Feedforward Gain
Sets the acceleration feedforward gain in the PIV&F
a
servo algorithm.
SGENB
Servo Gain Set Enable
Enables a previously-saved set of PIV&F gains. A set of gains (specific to the current
feedback source selected with the SFB command) is saved using the SGSET command.
SGI
Set Integral Feedback Gain
Sets the integral gain in the PIV&F servo algorithm.
SGILIM
Set Integral Windup Limit
Sets a limit on the correctional control signal that results from the integral gain action
trying to compensate for a position error that persists too long.
SGP
Proportional Feedback Gain
Sets the proportional gain in the PIV&F servo algorithm.
SGSET
Save a Set of Servo Gains
Saves the presently-defined set of PIV&F gains as a particular
gain set
(specific to the
current feedback source). Up to 5 gain sets can be saved and enabled at any point in a
move profile, allowing different gains at different points in the profile.
SGV
Set Velocity Feedback Gain
Sets the velocity gain in the PIV&F servo algorithm.
SGVF
Velocity Feedforward Gain
Sets the velocity feedforward gain in the PIV&F
v
servo algorithm.
SMPER
Maximum Allowable Position Error
Sets the maximum allowable error between the commanded position and the actual
position as indicated by the feedback device. If the error exceeds this limit, the APEX615n
shuts down power output to the motor. The motor will freewheel to a stop. You can enable
the ERROR command to continually check for this error condition, and when it occurs to
branch to a programmed response defined in the ERRORP program.
SOFFS
Servo Control Signal Offset
Sets an offset to the commanded analog output voltage, which is sent to the drive system.
SSFR
Servo Frequency Ratio
Sets the ratio between the update rate of the move trajectory and the update rate of the servo
action. The intermediate position setpoints calculated by the trajectory generator is updated
at a slower rate then the servo position correction. This command allows you to optimize
this for your application. The default setting (SSF4) is sufficient for most applications.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

 Loading...
Loading...





