Appendix A
83
Higher sampling frequencies improve the accuracy of the derived velocity and integral values.
A higher sampling frequency can also improve the tracking of a rapidly changing or oscillating
position. Therefore, the servo sampling frequency is a key parameter that influences the servo
system’s stability and closed loop bandwidth.
In addition to computing the APEX615n’s control signal, the DSP also computes the
commanded position trajectory. When the servo sampling frequency is increased, the motion
trajectory update rate has to be decreased, and vice versa. The ratio between the servo sampling
frequency and the trajectory update rate, called the sampling frequency ratio, depends on the
requirements of your application and/or the dynamic characteristics of the system. The Servo
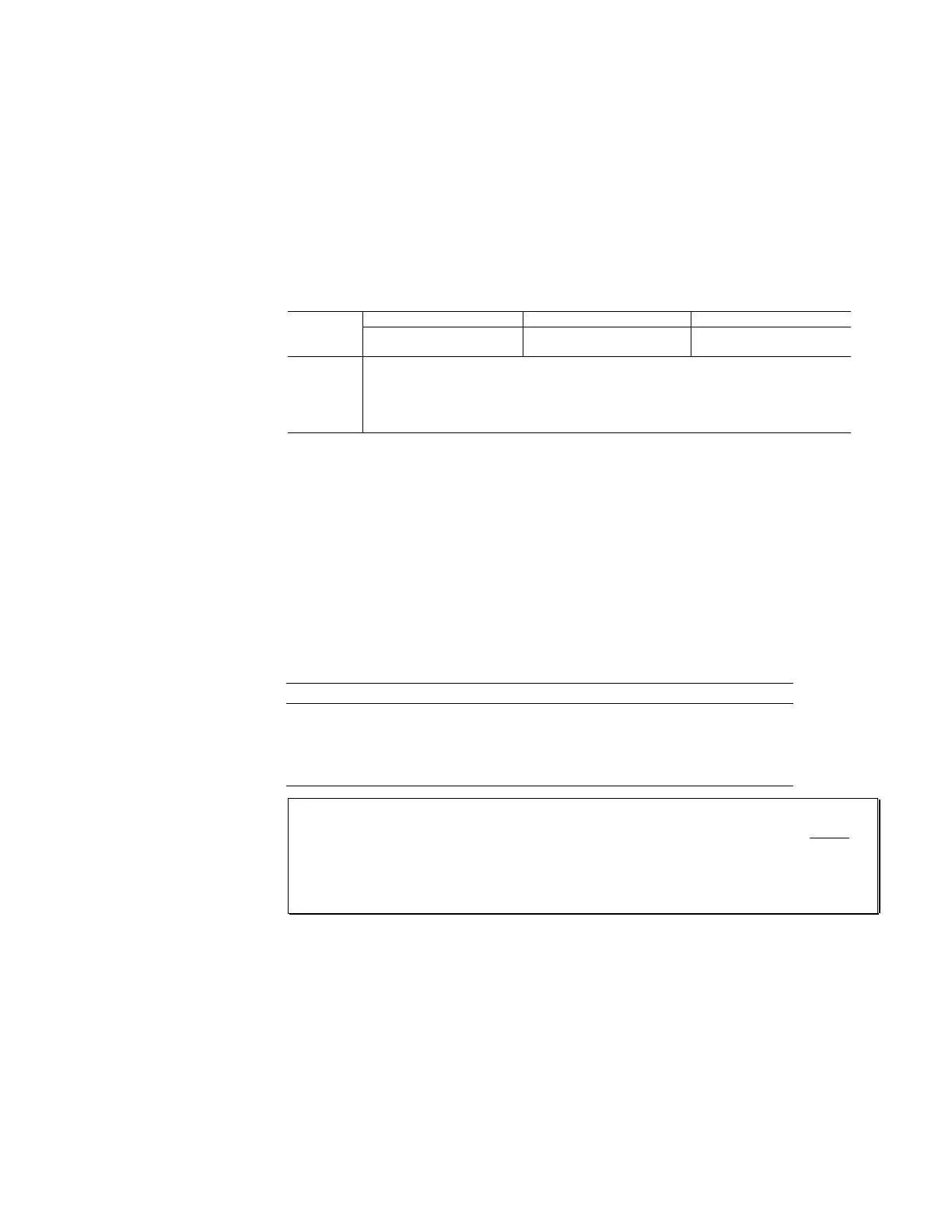
Sampling Frequency Ratio (SSFR) command offers four selectable ratio settings. These four
ratios and the actual sampling frequencies and sampling periods (reciprocal of sampling
frequency) are shown below.
SSFR Servo Sampling Update Motion Trajectory Update System Update
Command
Setting
Frequency
(samples/sec.)
Period
(µsec)
Frequency
(samples/sec.)
Period
(µsec)
Frequency
(samples/sec.)
Period
(µsec)
SSFR1 3030 330 3030 330 757 1320
SSFR2 5405 185 2703 370 675 1480
SSFR4 6250 160 1563 640 520 1920
SSFR8 6667 150 833 1200 417 2400
The general rule for determining the proper SSFR value is to first select the slowest servo
sampling frequency that is able to give a satisfactory response. This can be done by
experiment or based on the closed-loop bandwidth requirement for your application. (Keep in
mind that increasing the SSFR value allows for higher bandwidths, but produces a rougher
motion profile; conversely, decreasing the SSFR value provides a smoother profile, but makes
the servo system less stable and slower to respond.)
As an example, if your application requires a closed-loop bandwidth of 350 Hz, you can use
the following guideline to determine the minimum servo sampling frequency: set the servo
sampling frequency at least 8 times higher than the bandwidth frequency. The required
minimum servo sampling frequency would be 2800 Hz.
The table below provides guidelines for various application requirements.
Application Requirement SSFR1 SSFR2 SSFR4 SSFR8
XY Linear Interpolation
44
Fast point-to-point motion 44
Regulation (speed, torque, etc.) 44
High natural frequency system 4
Setting the Sampling Frequency Ratio
Select a sampling ratio (with the SSFR command) appropriate to your system now, before
you proceed to tune each gain.
If you change the sampling frequency ratios (SSFR) after the tuning is complete and the new
servo sampling frequency is lower than the previous one, the response may change (if your
system bandwidth is quite high) and you may have to re-tune the system.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
 Loading...
Loading...






