Pleiger Elektronik
GmbH & Co. KG
Page: 44 Manual for 362MC Edition: 6/2007 Subject to modifications
CtrlTyp = 2PntPW, 3PntPW and Cont
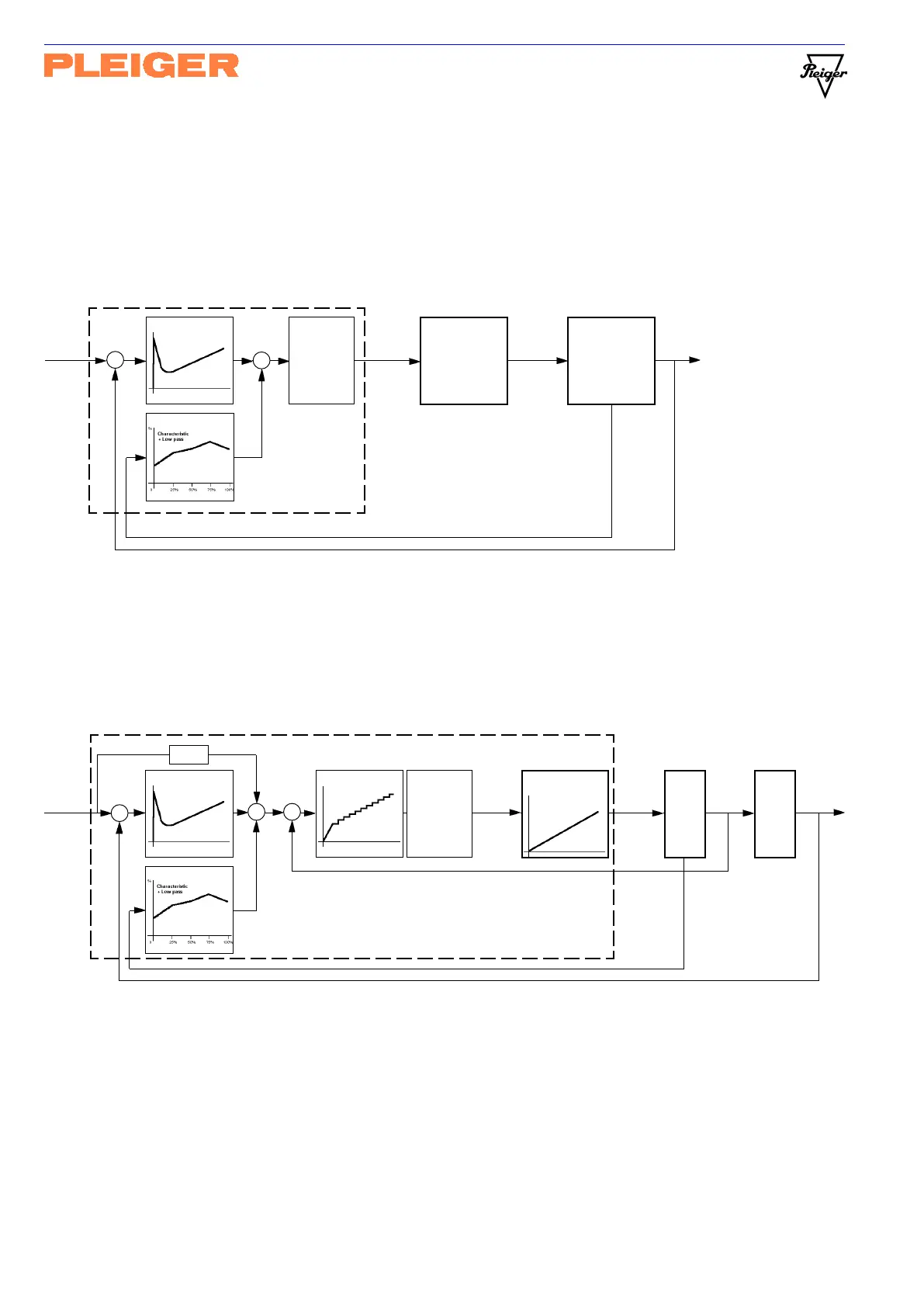
Depending on the type of controlled system, disturbance compensation may be expedient when
operating switching controllers with feedback and the continuous controller. After being
weighted via the characteristic and delayed by the low pass, the disturbance is added to internal
controller output Y of the continuous PID controller. It thus has a direct effect on the pulse-
width modulated switching output (PW) or the analogue output of the controller.
CtrlTyp = CscStep
Disturbance compensation is highly expedient in many applications when using the cascade
step controller. A measured value “Dist Z” from the system controlled by the secondary
controller may serve as the disturbance variable, for example. After being weighted via the
characteristic and delayed by means of the low pass, this disturbance is added to the
internal controller output Y = setpoint “Setp V” of the secondary controller. It thus has a direct
effect on the control process of the secondary controller.
In the case of the cascade step controller, the primary continuous PID controller always
uses the 1
st
parameter set (
1
) and the secondary 3-Point step controller always uses
the 2
nd
parameter set (
2
).
External changeover to the 2
nd
parameter set is thus not possible.
""
""
"
When the disturbance compensation function acts on a setpoint (Setp V), as is the
case with the cascade step controller, the % compensation is also proportional to
the scaling of the control range. When a scale from 0-200°C applies, a 1.0%
weighting for the disturbance compensation function (Z) will thus correspond to a
setpoint increase of 2.0°C.
""
""
"
Setp W dx Y Out+Y Feed Y ActV X
- + Out%Y
Example for controller type CtrlTyp = 2PntPW, 3PntPW and Cont
PID
disturbance
compensation
Actuator
362MC
Dist Z
Controlled
system
Switching
output PW
or
Analogue
output
Z
Setp W dx Y Setp V Out+Y Feed Y ActV U ActV X
-+-
Example for controller type CtrlTyp = CscStep
PID
disturbance
compensation
Actuator
362MC
Dist Z
PID
Switching
output PW
I
Part A Part B
Controlled system
Z
Kw
2
+