Pleiger Elektronik
GmbH & Co. KG
Edition: 6/2007 Subject to modifications Manual for 362MC Page: 45
CtrlTyp = Step , CscStep
Disturbance compensation is not expedient with the 3-Point step controller, either, and is thus
not implemented in the 362MC. Selecting this function for controller type “Step” will have no
effect. A 3-Point step controller with setpoint compensation can be implemented via special
parameterisation of a “CscStep” controller, however. After being weighted via the characteristic
and delayed by the low pass, the disturbance is added to “Setp W” to generate “Setp V”.
In this way, the disturbance leads directly to an increase or reduction in the setpoint.
Condition: Parameter of 1
st
parameter set Kr
1
=0, Kw
1
=1, other parameters not in use,
parameter of 2
nd
parameter set Kw
2
=1, other parameters to be set for step controller,
parameter in Input menu ActV X=NC, ActV U=PT100-1
Characteristic
The characteristic to weight the influence of the disturbance is defined via 5 interpolation points
distributed evenly over the value range. The values between the interpolation points are determined via
linear interpolation.
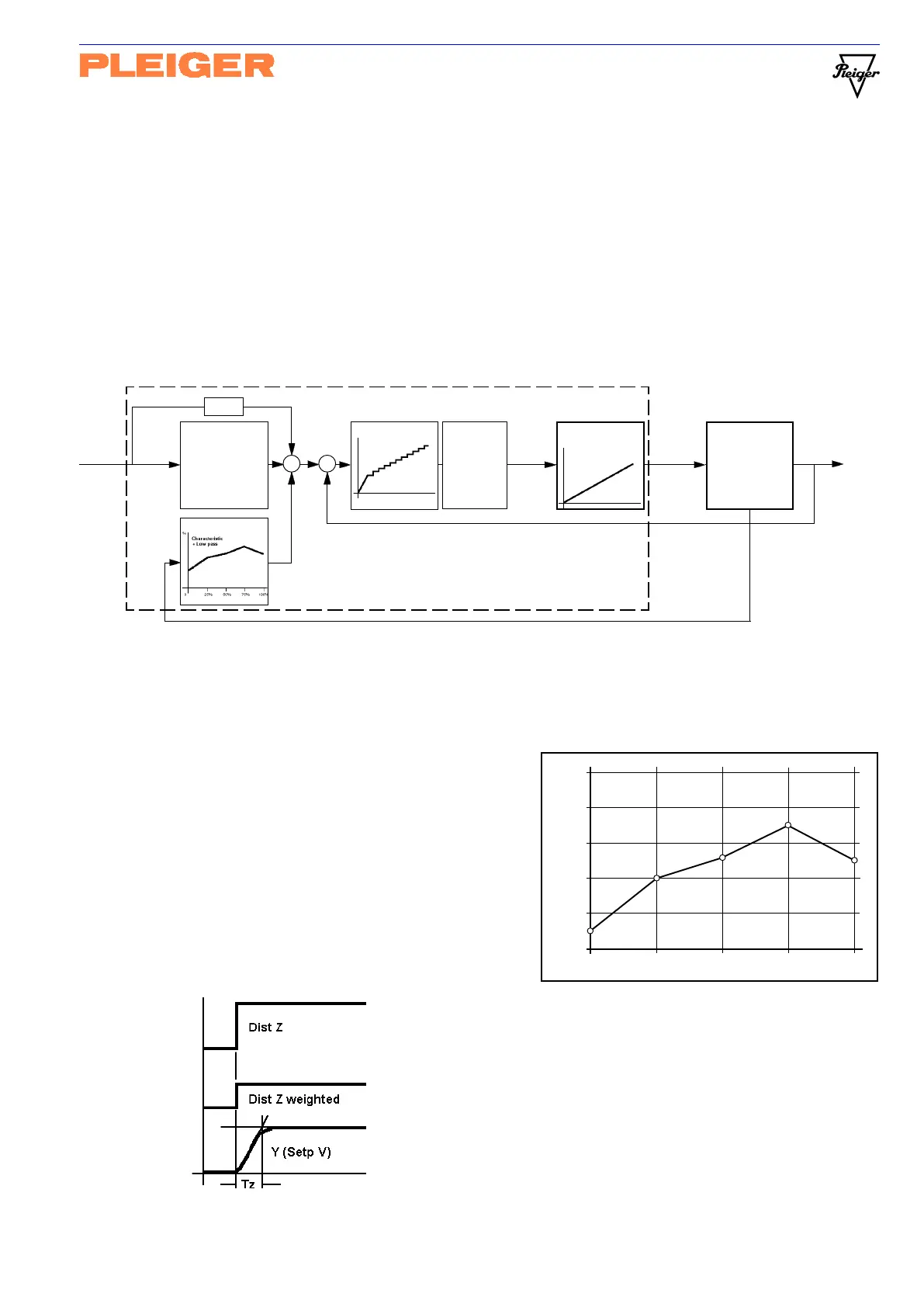
Example of the values of a characteristic: Graph of the characteristic:
(arbitrary values used for purpose of illustration)
Kz 0% = 10.0%
Kz 25% = 40.0%
Kz 50% = 50.0%
Kz 75% = 70.0%
Kz100%= 50.0%
In accordance with this characteristic, the contoller
output is increased by +40% points at a disturbance
factor of 25%, for example, and by +70% points at a
disturbance factor of 75%.
If the controller output is limited by Ymin and Ymax,
these limits will continue to apply.
Compensation delay
Application of the disturbance to the controller
output is delayed by time Tz.
100 %
80 %
60 %
40 %
20 %
0 %
0 % 25 % 50 % 75 % 100 %
disturbance value
Weighting (added to controller output)
Setp W Y Setp V Out+Y Feed Y ActV U
+-
Example for controller type CtrlTyp = CscStep (setpoint compensation)
disturbance
compensation
Actuator
362MC
Dist Z
PID
Switching
outputPW
I
Controlled
system
(Part A)
Z
Kw
2
+
Kr
1
=0
Kw
1
=1