Operation
20220596E 23
2.11 Navigating with the AP21 or AP22
The autopilot has the capability to use steering information
from an external navigator (GPS, LORAN, Decca) to direct the
boat to a specific waypoint location, or through a route of
waypoints. In NAV mode, the autopilot uses the heading sensor
as it's reference for course keeping. The steering information
received from the external navigator alters the set course to
direct the autopilot to the destination waypoint.
The autopilot is designed to steer in mixed mode operation.
This combines the straight steering capability of cross track error
(XTE) steering in conjunction with the turning capability of
bearing mode steering.
To obtain satisfactory navigation steering, the following points
must be fulfilled prior to entering the NAV mode:
• The autopilot autosteering must be tested and found
satisfactory.
• The navigation receiver must be operating and the
navigation system (GPS, LORAN, Decca) must be in full
operating mode with adequate signal characteristics for valid
position and steering data.
• At least one waypoint must be entered and selected as the
current waypoint in the navigation receiver.
• The navigation source in the AUTOPILOT USER SETUP
menu must be set for the navigator that contains the current
waypoint.
Note ! Navigational steering must only be used in open waters. The process of
having an external navigation receiver direct an autopilot can be a slow
acting process. By selecting the NAV mode, the autopilot is set for
automatic steering on the current set course and then waits for the user
to accept the course change to the destination waypoint.
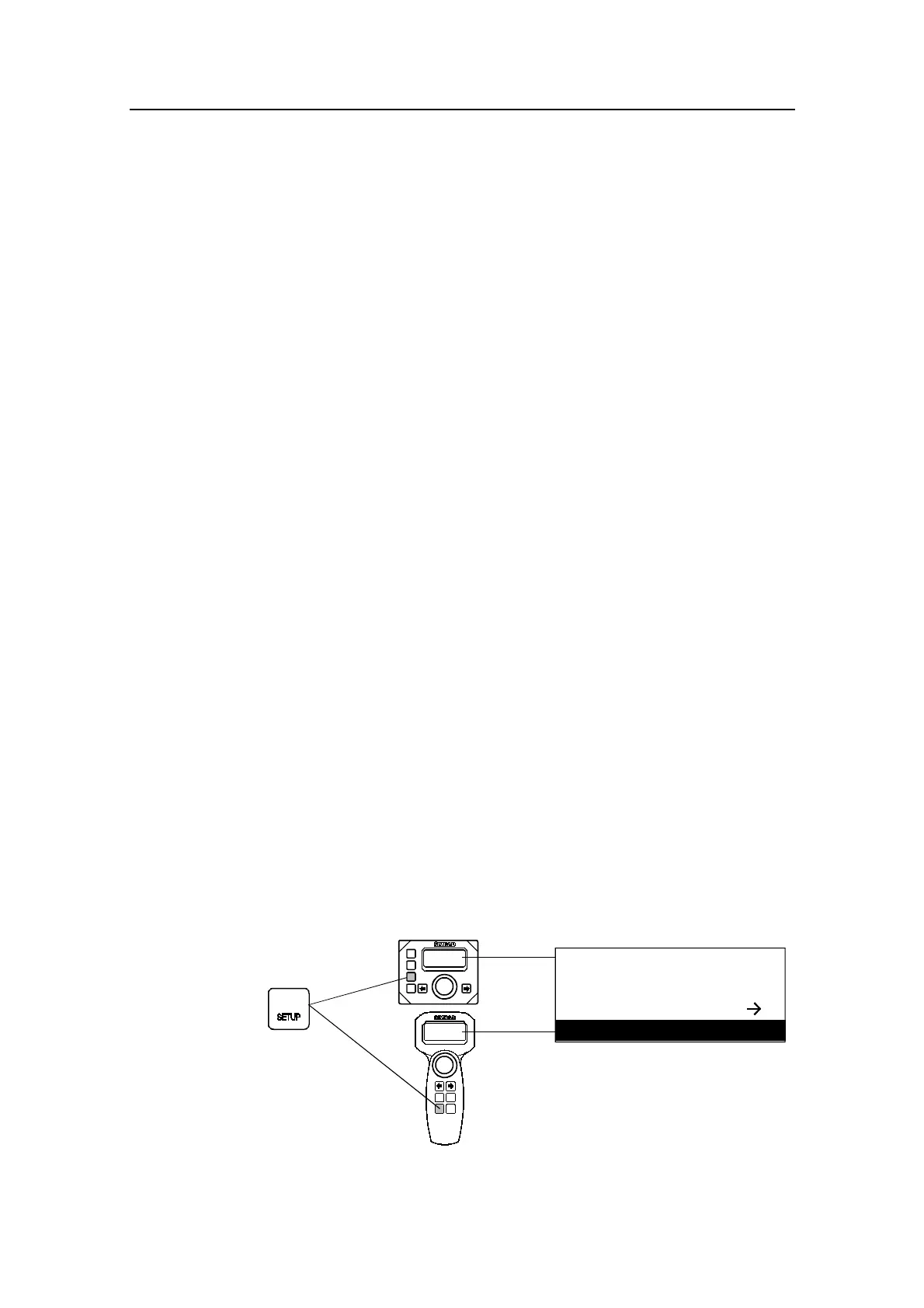
Press
NAV
WP: Egersund
Brg.: 153°
Chg.: 23°
OK?:Press NAV
to activate
prompt display