4.5.1.Approximate Repositioningof the Solution
The following method does not guarantee a precise repositioning of the Solution.
Robot movementsshould be performed, tested and validated after each repositioning processto ensure accuracy.
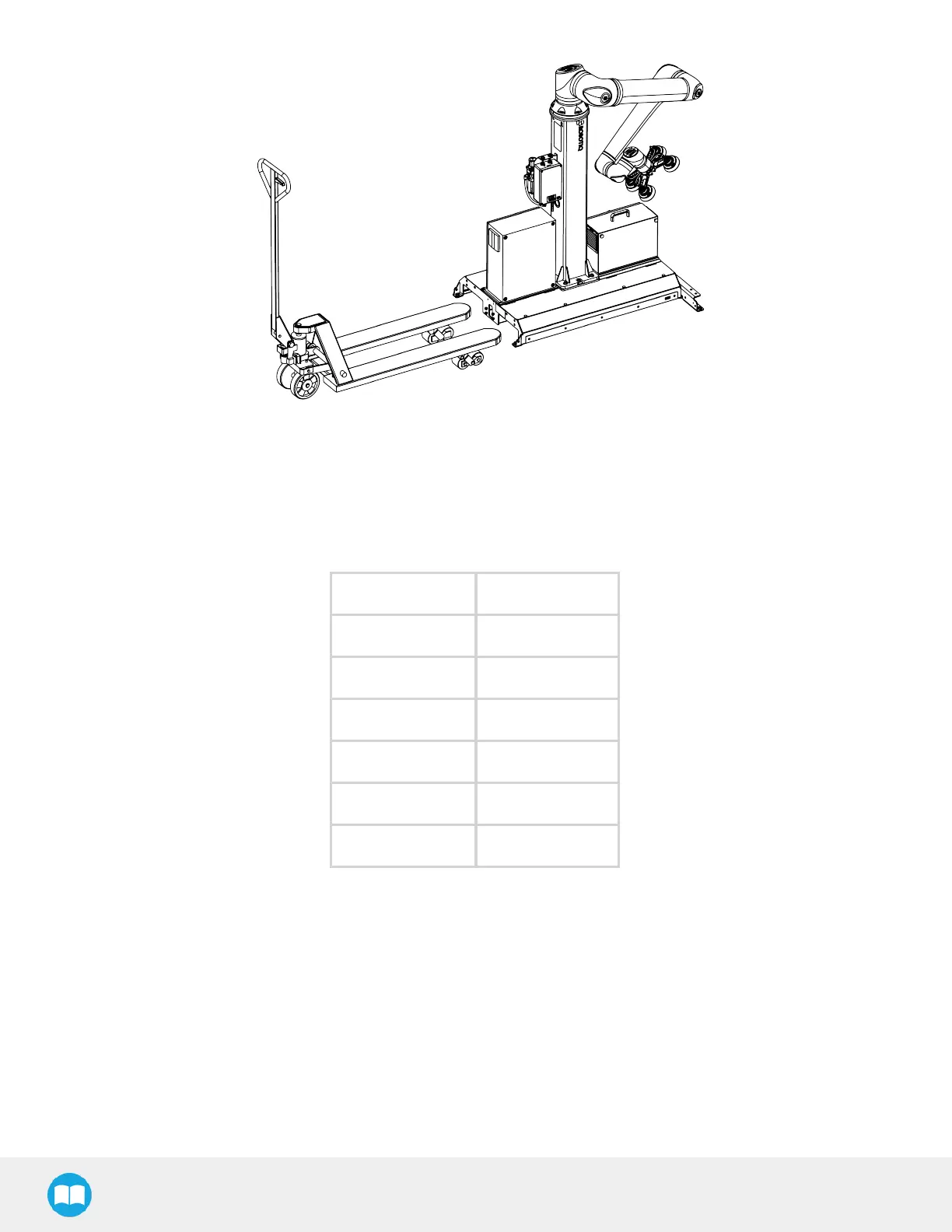
1. Set the robot in a transport position by referring to the joint positions below.
Joint Position
Base -75°
Shoulder -200°
Elbow -125°
Wrist 1 90°
Wrist 2 90°
Wrist 3 90°
2. Disconnect the power and pneumatic supplies as well asany other cabling that may interfere with the movement of the
Solution.
3. Place the teach pendant on itsrack at the operator station, or place it on the support rack of the robot’s control box and run
the teach pendant cable on the base of the Solution.
68