Fig. 5-14: Examplesof Box Center Offset from TCP
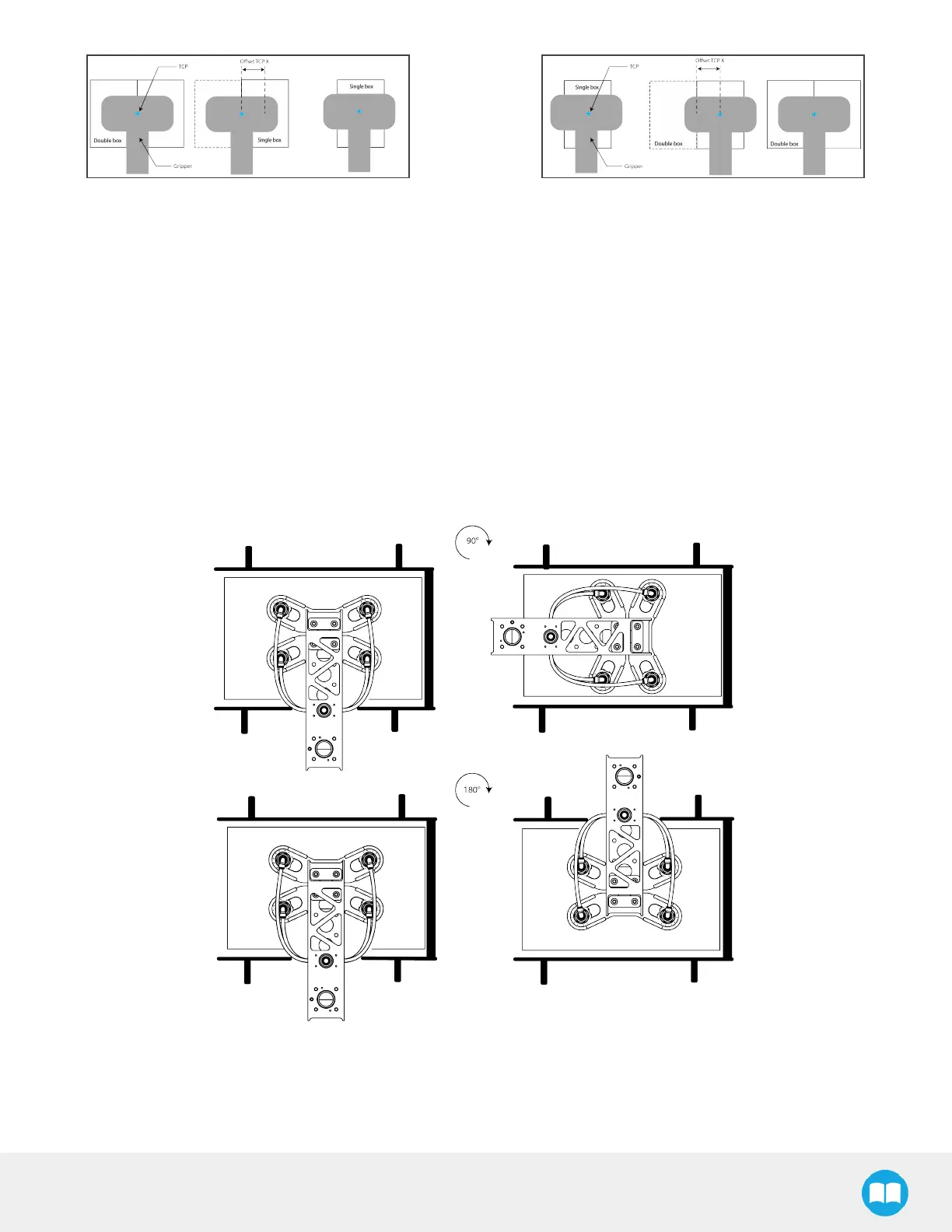
c. Allowgripper to pick the boxat different angles
In order to optimize the trajectory and travel of the robot arm during the palletizing or depalletizing process, the user can allow or
prevent the gripper to pick up the boxesfrom different angles.
Tick or untick either box to allow or prevent the gripper from picking the boxesas if the robot wrist had performed a 90- or 180-
degree rotation on the Z-axis.
When the multi-pickfeature isdisabled in the Settings menu, the System defaultsto allowing the gripper to pick the boxesasif
the robot wrist had performed a 90- or 180-degree rotation on the Z-axis.
When the multi-pickfeature isenabled in the Settingsmenu, the system defaultsto allowing the gripper to pick the boxesasif the
robot wrist had performed a 180-degree rotation on the Z-axis.
Fig. 5-15: Depiction of Gripper Rotations Based on the Option to Pick Up BoxesFrom Different Angles
89