APPENDIX A – HANDLING FAULT CONDITIONS.
Foundation Fieldbus blocks have a large number of parameters which influence the way in which the
actuator responds to commands from the Fieldbus. In the event that communications are lost to the
actuator, a number of these parameters are available to allow a predictable and deterministic reaction.
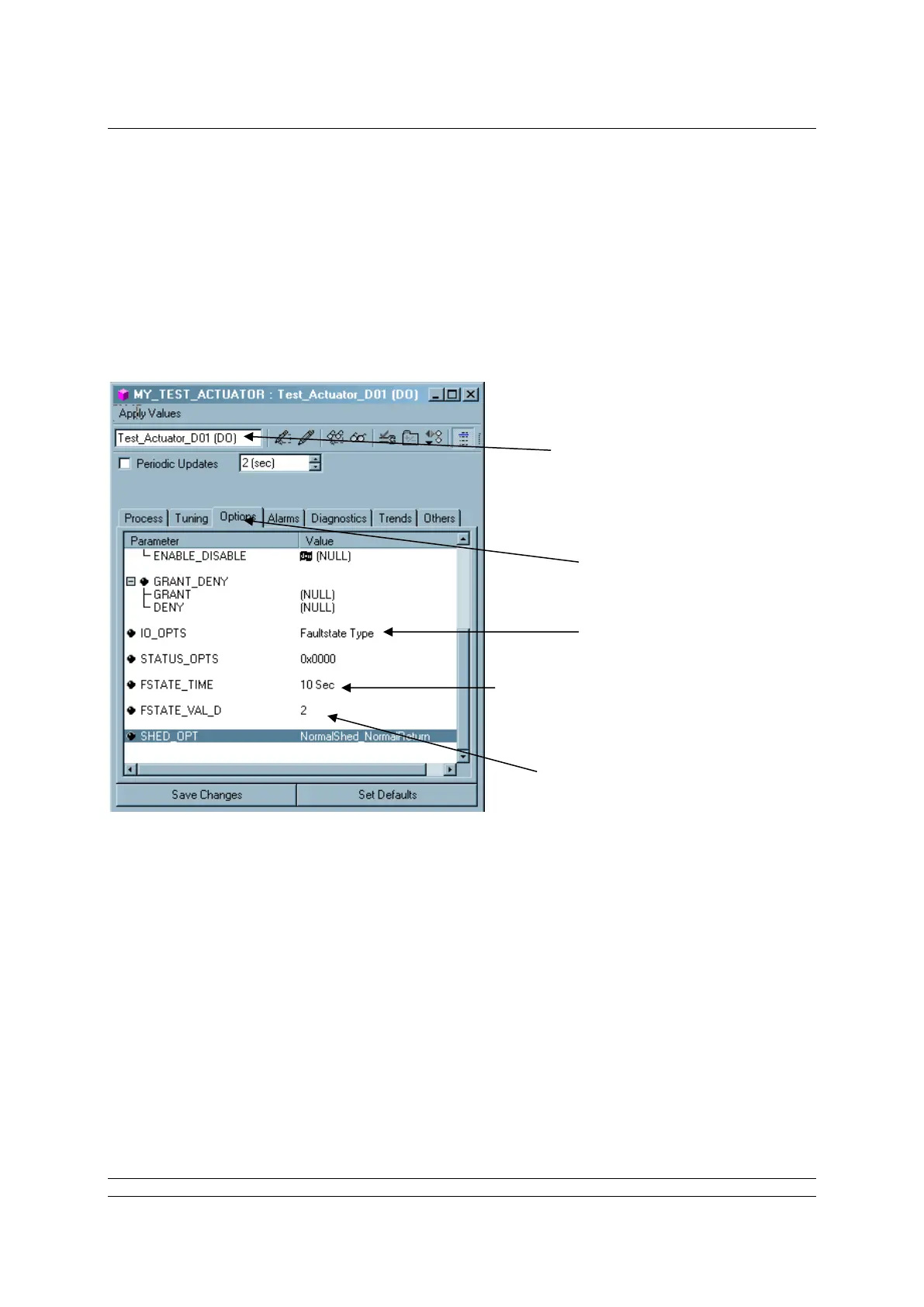
The example below shows how an action may be configured to determine how a Digital Output Block
will react on the loss of the cascade input to the block.
Fig A.1: Settings dialogue, as seen in National Instruments NI-FBUS Configurator.
This type of configuration is possible for all of the DO and AO blocks in the actuator.
This value is written to the output
of the block after the time delay. In
this case ‘2’ is written to the output
of the DO block.