Connectors
Examples for the use of conductors:
▶ Motors with resolver
LIYCY 3 x 2 x 0.14 or 4 x 2 x 0.14 for motors with integrated thermal contact. Con-
ductors: shielded, twisted in pairs. Twist mode: sine/sine, cosine/cosine, rotor/rotor
and, if necessary, thermal contact/thermal contact.
For delicate applications we recommend additional shielding of the separate pairs.
▶ Motors with incremental encoder
LIYCY 5 x 0.14 or 7 x 0.14 for motors with integrated thermal contact.
▶ Motors with Hall sensors and tachometer generator
LIYCY 9 x 0.14 or 12 x 0.14 for motors with integrated thermal contact.
7.3 P2P Button
On the front panel of the device you find a small circular opening. The P2P button is lo-
cated behind this opening. By means of this button you can switch from the parameter-
ized IP mode to the temporary IP mode “Point to point (AutoIP)”.
This is required, for example, when the parameterized IP mode is not correct and you
have no connection with the device to change the parameterization. In this case, pro-
ceed as follows:
1. Push the button using a pointed object (e.g. ball pen) for at least 1 second.
2. Disconnect the LAN cable (X11) and connect it directly to the PC.
The new IP mode is indicated via the LEDs and is then active. Now, you can change
the parameterization.
3. To exit the temporary P2P mode, push the P2P button again for at least 1 second
or switch the device off and on.
For a detailed description of the procedure refer to the document “Drive Amplifier SD4x
– Ethernet Configuration”.
7.4 X6 – encoder
Encoder input for motor feedback
▶ encoder (quadrature A/B, pulse/direction, up/down)
▶ 5 V pulse encoder
▶ BiSS C
▶ RENISHAW BiSS C
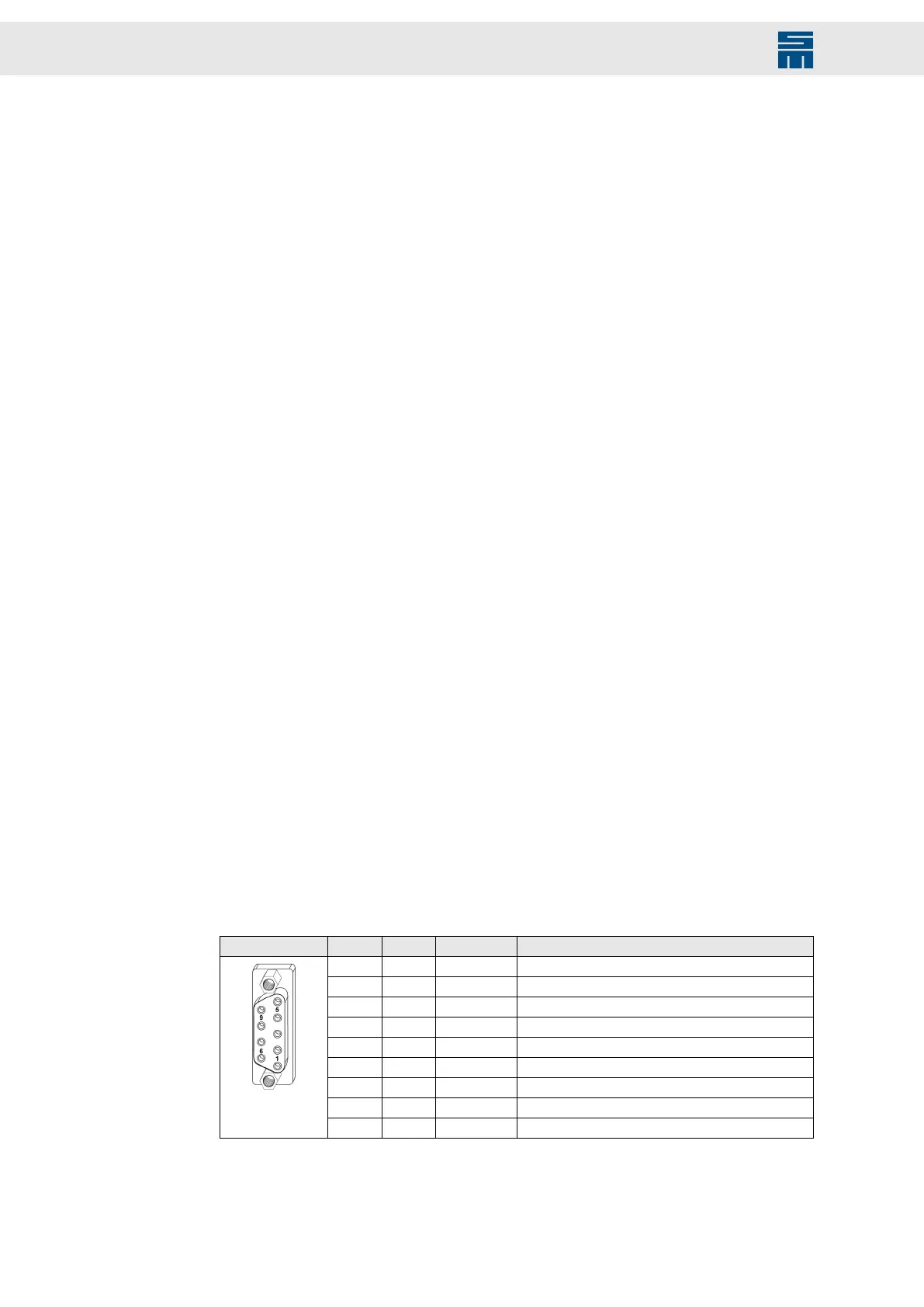
9-pole female D-sub connector
X6 (ENC1) Pin I/O Name Meaning (measuring system 1)
1 I/O M1_A+ Track A+
2 I/O M1_A− Track A−
3 I/O M1_N+ Zero pulse +
4 I/O M1_N− Zero pulse −
5 I/O GND Ground
6 I/O M1_B+ Track B+
7 I/O M1_B− Track B−
8 O VCC5.3 5.3 V supply voltage
9 I M1_AUX+ Pulse IN (5 V)
The cable shield is connected to the connector shell.
Stud bolt flange: max. tightening torque = 0.7 Nm
34 Drive Amplifier SD4B - Hardware Description