3. For verification purposes, perform the measurement again.
4.
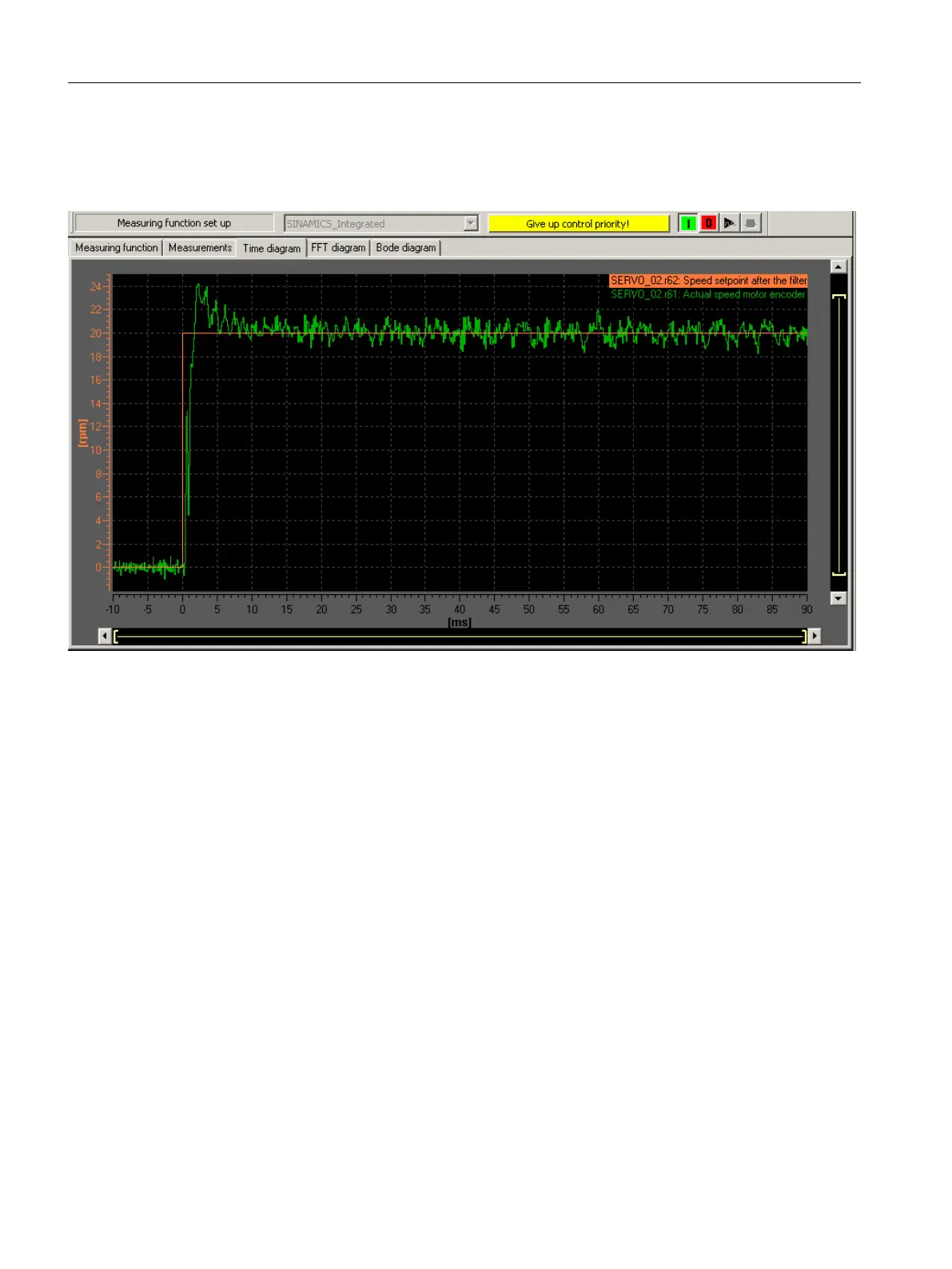
With the modified parameters, the controller displays a much better transient response. If
necessary, you can continue changing the value until the transient response is optimal.
Figure 7-42 Measurement with modified P-gain
Commissioning (software)
7.14 Optimizing the drive and controller
SIMOTION D410-2
230 Commissioning and Hardware Installation Manual, 01/2015
 Loading...
Loading...




