Detailed Description
2.1 Spindle modes
Basic logic functions: Spindles (S1)
20 Function Manual, 11/2006, 6FC5397-0BP10-2BA0
Acceleration
The dynamic response during positioning can be modified by programming or by
synchronized actions:
ACC[Sn]
Programming or synchronized action
ACC[Sn]=0
the configured acceleration is active
n: Spindle number, 0 ... max. spindle number
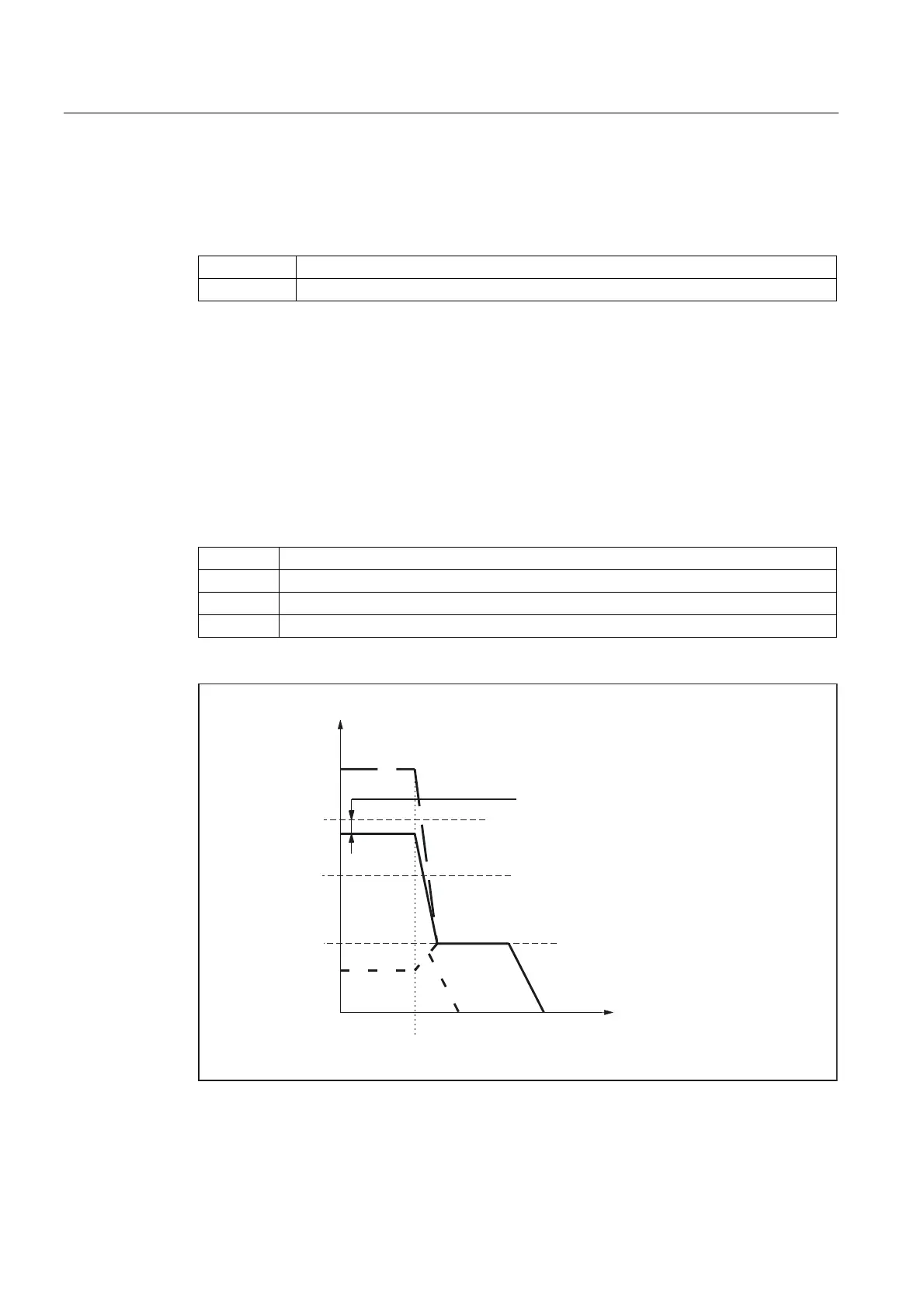
Positioning from rotation
The spindle can be in speed control mode or in position control mode when positioning starts
(SPOS, M19 or SPOSA command in the program).
The following sequence is obtained:
Case 1: Spindle in speed control mode, encoder limit frequency exceeded
Case 2: Spindle in speed control mode, encoder limit frequency not exceeded
Case 3: Spindle in position control mode
Case 4: Spindle speed ‹ Position-control activation speed
6326>@
UHYPLQ
0'(1&B)5(4B/,0,7
0'(1&B)5(4B/,0,7B/2:
0'63,1'B326&75/B9(/2
FRQWUROUHVHUYH
6SLQGOHVSHHG
7LPHW
3KDVHDVSHFLDOFDVH
3KDVH
3KDVH
3KDVH
3KDVH
(QFRGHUOLPLWIUHTXHQF\
(QFRGHUOLPLWIUHTXHQF\
5HV\QFKURQL]DWLRQ
3RVLWLRQFRQWURODFWLYDWLRQVSHHG
3KDVHE
3KDVHF
3KDVHD
3KDVHD
Figure 2-2 Positioning from rotation

 Loading...
Loading...


























