Detailed description
2.1 NC/PLC interface signals
Basic logic functions: Various NC/PLC interface signals and functions (A2)
Function Manual, 11/2006, 6FC5397-0BP10-2BA0
19
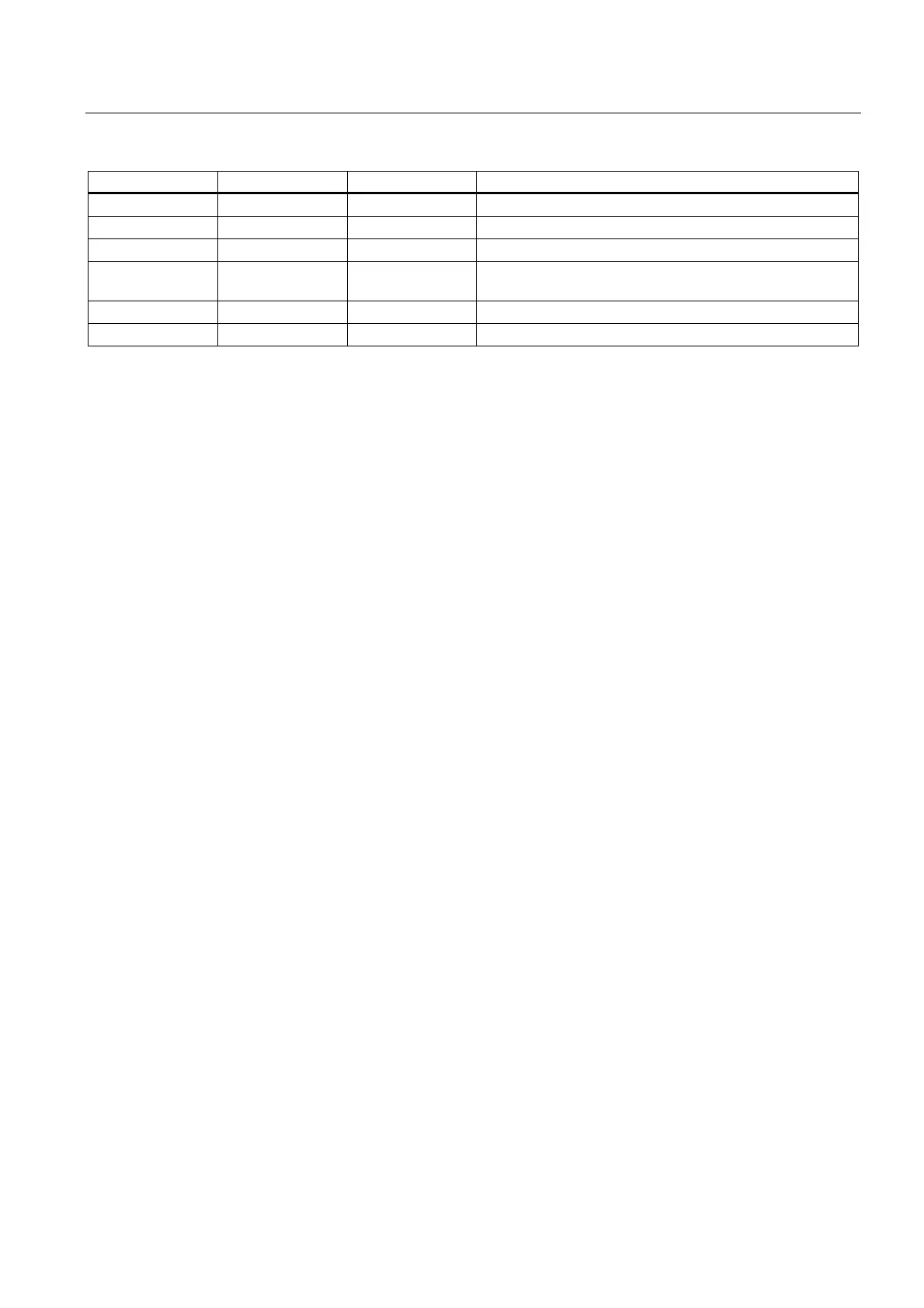
DB31, ... DBX1.5
DB31, ... DBX1.6 DB31, ... DBX2.1 Function
1
0 (or 1) 1 Position measuring system 1 active
0
1 1 Position measuring system 2 active
0
0 0 "Parking" active
0
0 1 Spindle without position measuring system (speed-
controlled)
1 -> 0
0 -> 1 1 Switchover: Position measuring system 1 → 2
0 -> 1
1 -> 0 1 Switchover: Position measuring system 2 → 1
DB31, ... DBX2.1 (servo enable)
Setting the servo enable closes the machine axis position control loop. The machine axis is
in position control mode.
DB31, ... DBX2.1 == 1
Canceling the servo enable opens the machine axis position control loop and, subject to a
delay, the machine axis speed control loop:
DB31, ... DBX2.1 == 0
Activation methods
The closed-loop servo enable for a machine axis is influenced by:
• PLC user program by means of the following NC/PLC interface signals:
– DB31, ... DBX2.1 (servo enable)
– DB31, ... DBX21.7 (pulse enable)
– DB31, ... DBX93.5 (drive ready)
– DB10, DBX56.1 (EMERGENCY STOP)
• NCK-internal
Alarms that trigger cancellation of the servo enable on the machine axes. Alarms, which
cancel the servo enable, are described in:
References:
/DA/Diagnostics Manual
Canceling the servo enable when the machine axis is at standstill:
• The machine axis position control loop opens
• DB31, ... DBX61.5 = 0 (position controller active)
Canceling the servo enable when the machine axis is in motion:
If a machine axis is part of an interpolatory path movement or coupling and the servo enable
for this is canceled, all axes involved are stopped with a fast stop (speed setpoint = 0) and
an alarm is displayed:
Alarm: "21612 Servo enable reset during movement"
• The machine axis is decelerated taking into account the parameterized temporal duration
of the brake ramp for error states with a fast stop (speed setpoint = 0):
MD36610 $MA_AX_EMERGENCY_STOP_TIME (max. time duration of the braking ramp
in event of errors)

 Loading...
Loading...


























