94 | Setup at installation
Rudder sets the rudder gain which is the ratio between
the commanded angle and the heading error.
• Too little Rudder and the autopilot fails to keep a
steady course
• Too much Rudder gives unstable steering and reduces
speed
• Low speed requires more rudder than high speed
See also “Minimum Rudder” on page
95.
Counter Rudder
is the parameter that counteracts the
effect of the boat’s turn rate and inertia. For a short time
period it is superimposed on the proportional rudder
response caused by the heading error. It may sometimes
appear as if it tends to make the rudder move to the
wrong side (counter rudder).
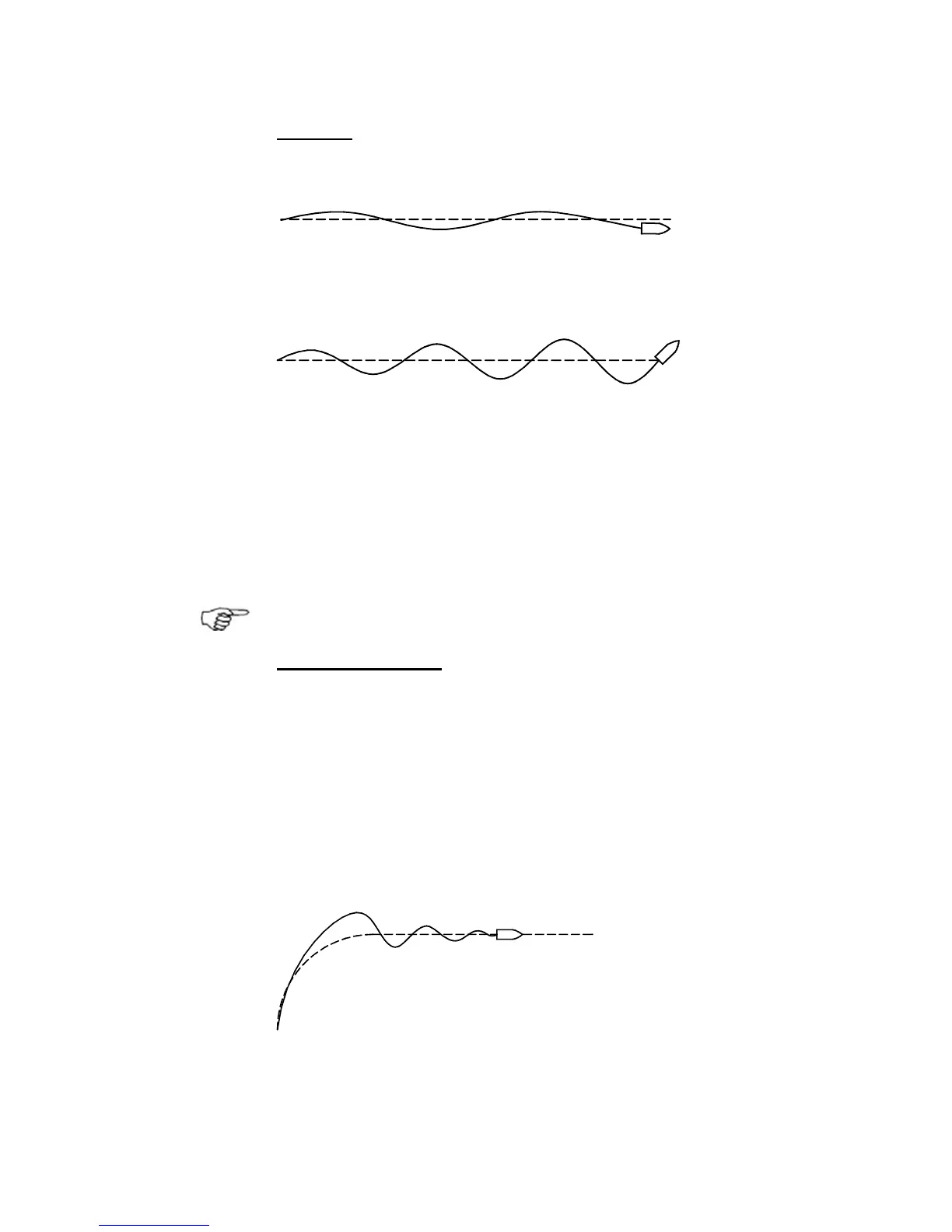
The best way of checking the value of the Counter
Rudder setting is when making turns. The figures
illustrate the effects of various Counter Rudder settings.
Too little Rudder
Too much rudder