<Contents>
A positioning operation or pushing operation is requested.
Before execute the return to origin position.
<Countermeasure>
Modify the setting so that those operations will be requested
after the return to origin position is completed.
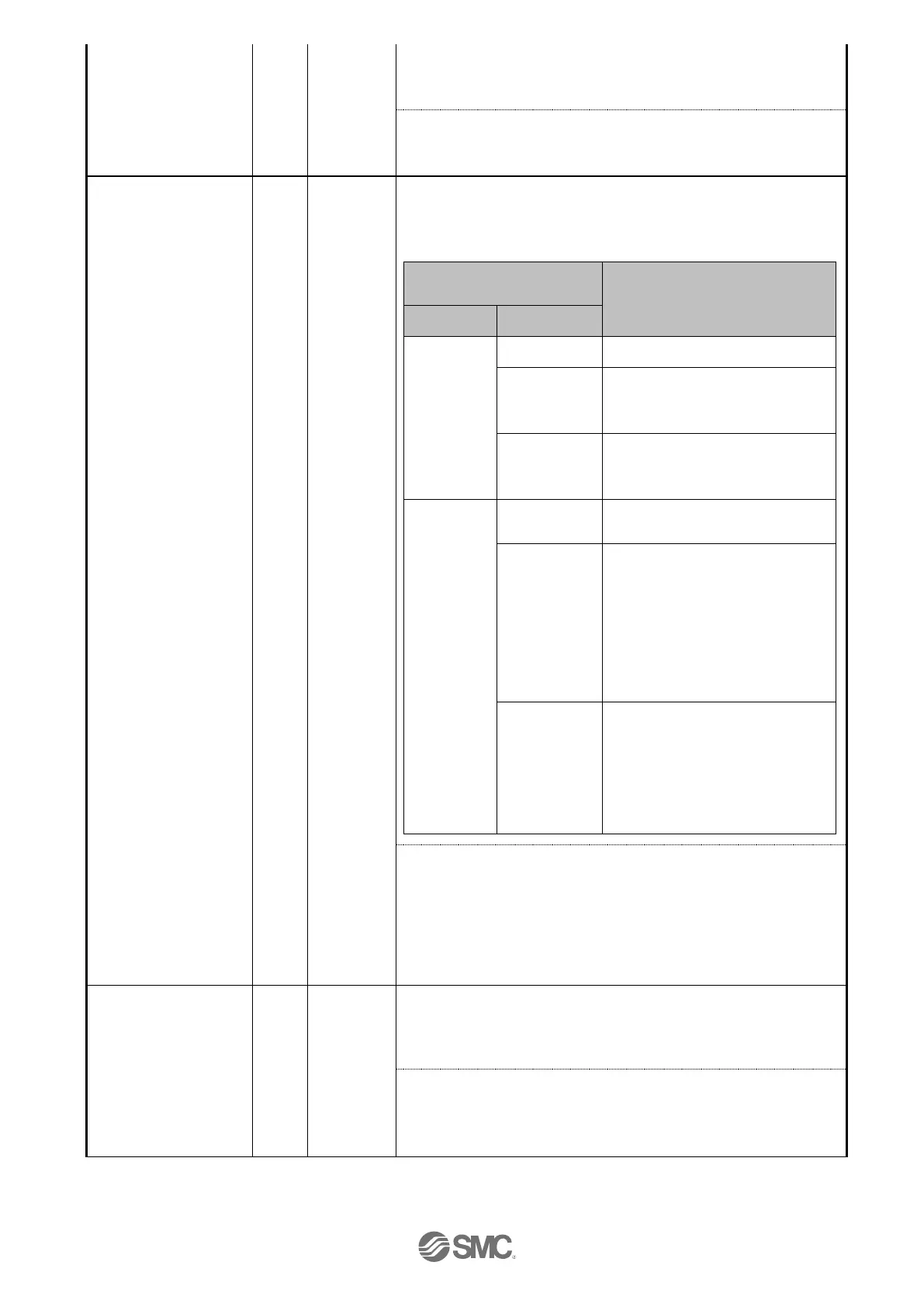
<Contents>
The origin sensor does not respond correctly when return to origin
operation is performed with the origin sensor. Alarm is generated
depending on the set value of the return to origin parameter.
Return to origin parameter
setting
Alarm generating conditions
1: Return to
origin by
pushing
force
No alarm will be generated
The end position is detected when
the sensor has been off since the
return to origin operation started
The end position is detected when
the sensor has been on since the
return to origin operation started
2,3. Return
to origin with
sensor
Right after inputting a command of
return to origin.
Right after inputting a command of
return to origin, the end position is
detected when the sensor has
been off since the return to origin
operation started. Or the end
position is detected after the sensor
ON is detected and before the
return to origin operation is
completed.
The end position is detected when
the sensor has been on since the
return to origin operation started or
the end position is detected after
the sensor OFF is detected and
before the return to origin operation
is completed.
<Countermeasure>
- When ORIG mode is 1:
Set the return to origin sensor at “0”.
- When ORIG mode is 2 or 3:
Set the return to origin sensor in accordance with the sensor
specifications. Also, check if the sensor mounting and the
cable connection of the sensor are correct.
<Contents>
The alarm is generated when the communication between the
controller circuit and the absolute circuit is not normal. (This
controller has not absolute function.)
<Countermeasure>
Make sure that the sensor type of the basic parameter is 1.
After the parameter is changed, it is necessary to reapply the
power.

 Loading...
Loading...












