- 43 -
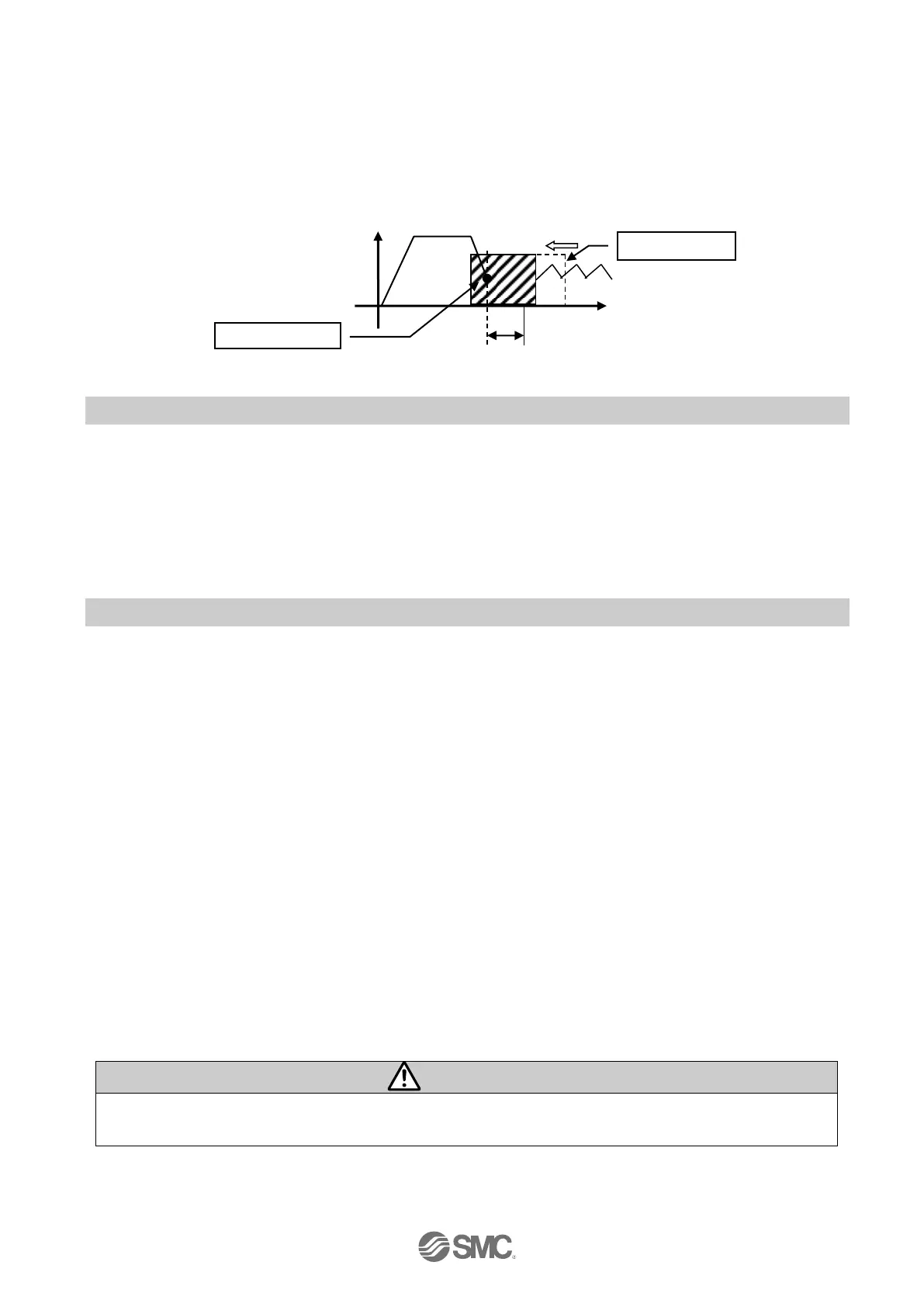
2) Movement of the work piece in the direction opposite to the pushing direction
(The electric actuator is pushed back since the reaction force from the work piece is too large.)
After completion of the pushing operation, if the reaction force from the work piece becomes larger,
the electric actuator may be pushed back. In such case, while the INP output is kept be ON, the
electric actuator will be pushed back to the point where the reaction force and the electric actuator
pushing force are balanced (pushed back toward the target position). If the electric actuator is
pushed back over the target position, the alarm (ORIG ALM) will be activated.
Position
8.4 Controller input signal response time
The factors that may cause the controller to delay’s in responding to the input signal are as follows:
(1) The controller delayed in scanning the input signal.
(2) The analysis and computing of the input signal is delayed.
(3) The analysis and processing of the command is delayed.
Leave an interval of 15 ms (30 ms if possible) or more between input signals and maintain the state of the
signal for 30ms or more, as PLC processing delays and controller scanning delays can occur.
8.5 Methods of interrupting operation
There are two methods of interrupting operation and stopping the electric actuator during positioning
operation and pushing operation, as shown below. The state after stopping is different, so use the
method appropriate to the application.
●Stopping by EMG signal
If the EMG signal is turned OFF during operation, after the electric actuator decelerates and stops, the
servo will turn OFF so the stopped position is not held. (For the electric actuator with lock, it is held by
the lock function.)
●Stopping by RESET signal
If the RESET signal is turned ON during operation, after the electric actuator decelerates and stops, the
stopped position is held. (The servo does not turn OFF.)
●Stopped by HOLD signal
The electric actuator decelerates to stop when HOLD signal is ON during operation.
(The servo does not turn OFF.)

 Loading...
Loading...









