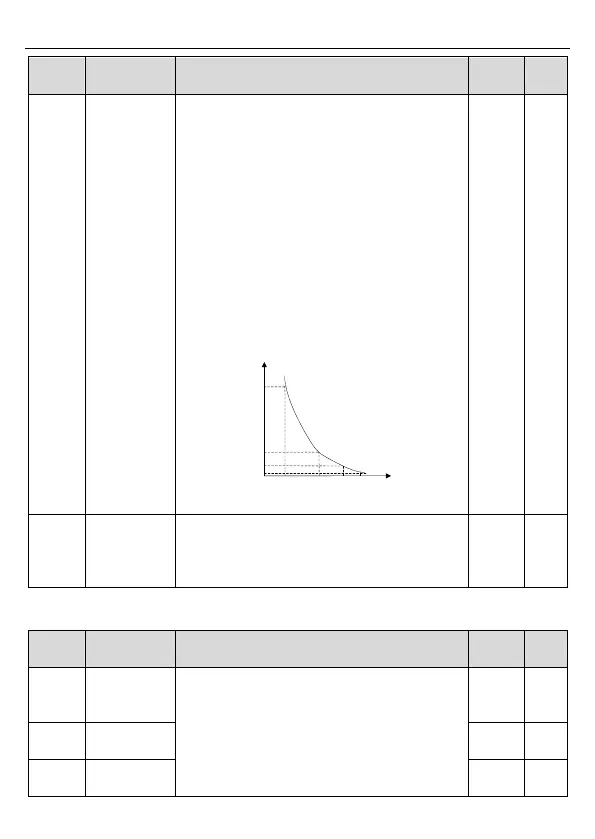
Times of motor overload M = Iout/(In*K)
In is the rated current of the motor, Iout is the
output current of the inverter and K is the motor
protection coefficient.
So, the bigger the value of K is, the smaller the
value of M is. When M=116%, protection is
performed after motor overload lasts for 1 hour;
when M=150%, protection is performed after
motor overload lasts for 12 minutes; when
M=180%, protection is performed after motor
overload lasts for 5 minutes; when M=200%,
protection is performed after motor overload lasts
for 60 seconds; and when M≥ 400%, protection
is performed immediately.
Correct the power displaying of motor 1.
Only impact the displaying value other than the
control performance of the inverter.
Setting range: 0.00–3.00
The parameters P03.00–P03.05 only apply to
vector control mode. Below the switching
frequency 1 (P03.02), the speed loop PI
parameters are: P03.00 and P03.01. Above the
switching frequency 2 (P03.05), the speed loop
PI parameters are: P03.03 and P03.04. PI
parameters are gained according to the linear