TECDrive20-EU Series Inverter Function parameters
-85-
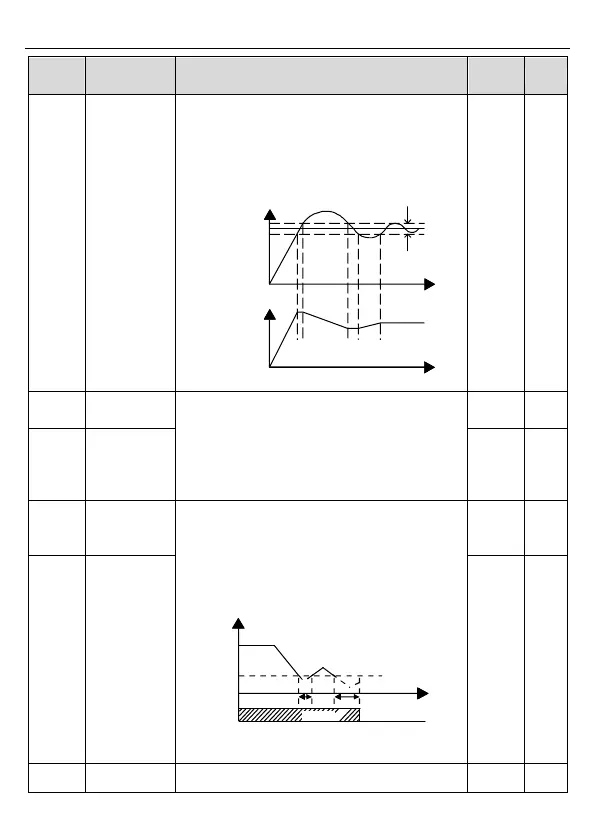
PID control
deviation limit
The output of PID system is relative to the
maximum deviation of the close loop reference.
As shown in the diagram below, PID adjustor
stops to work during the deviation limit. Set the
function properly to adjust the accuracy and
stability of the system.
Output frequency
T
T
Feedback value
Bias limit
Reference value
Setting range: 0.0–100.0%
Upper limit of
PID output
These parameters are used to set the upper and
lower limit of the PID adjustor output.
100.0 % corresponds to max. frequency or the
max. voltage of (P04.31)
Setting range of P09.09: P09.10–100.0%
Setting range of P09.10: -100.0%–P09.09
Lower limit of
PID output
Feedback
offline
detection value
Set the PID feedback offline detection value,
when the detection value is smaller than or equal
to the feedback offline detection value, and the
lasting time exceeds the set value in P09.12, the
inverter will report "PID feedback offline fault"
and the keypad will display PIDE.
T
Output frequency
t1
t2
P09.11
In running
Fault output PIDE
PIDE
Setting range of P09.11: 0.0–100.0%
Setting range of P09.12: 0.0–3600.0s
Feedback
offline
detection time
 Loading...
Loading...