4.3 Trial Operation for Servomotor without Load from Host Reference
4-3
4.3 Trial Operation for Servomotor without Load from Host
Reference
Check the following items before performing trial operation of the servomotor without load from host refer-
ence.
• Check that servomotor operation reference input from the host to the SERVOPACK and I/O signals are set
properly.
• Check that the wiring between the host and SERVOPACK and the polarity of the wiring are correct.
• Check that all operation settings for the SERVOPACK are correct.
Perform the trial operation using the following procedure.
Note: To perform trial operation of a servomotor with a brake, refer to 4.5 Trial Operation of Servomotor with Brakes.
Trial Operation in Speed Control
Refer to 4.4.2 Trial Operation in Speed
Control.
Trial Operation in Position Control
Refer to 4.4.4 Trial Operation in Position
Control.
Position Control with Host
Refer to 4.4.3 Trial Operation under Position
Control from the Host with the SERVOPACK
used for Speed Control.
Perform the trial operation of the servomotor with the machine.
Refer to 4.5 Trial Operation with the Servomotor Connected to the Machine.
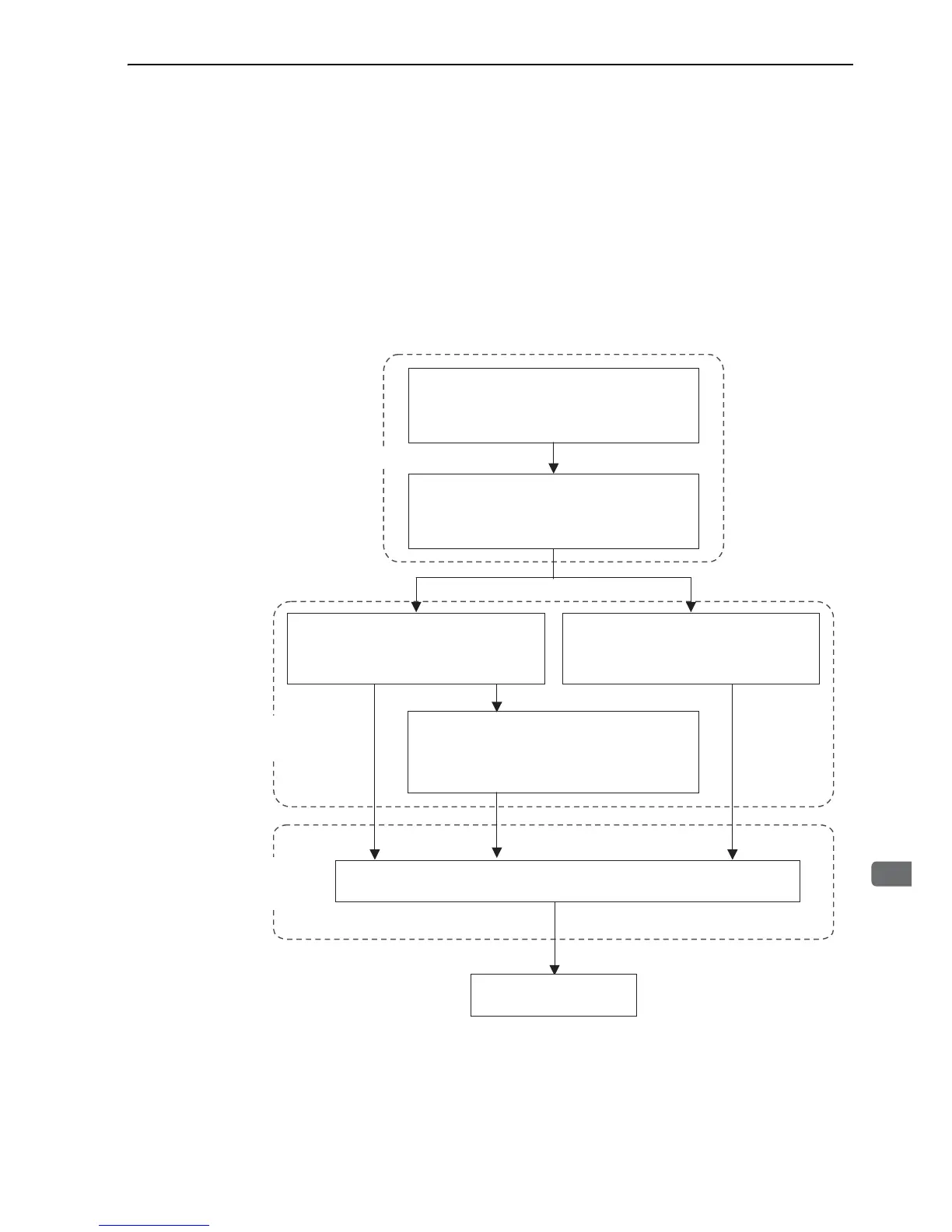
Preparations
Trial Operation
in Each Control
Trial Operation
in Combination
with Machine
Actual Operation
Confirm the check items and precautions
before trial operation.
Refer to 4.1 Inspection and Checking before
Trial Operation.
Check the connection and status of the input
signal circuits.
Refer to 4.4.1 Inspecting Connection and
Status of Input Signal Circuits.
Refer to 4.1 Inspection and Checking
before Trial Operation.
Refer to 4.3.1 Inspecting Connection
and Status of Input Signal Circuits.
Refer to 4.3.4 Trial Operation in Position
Control.
Refer to 4.3.2 Trial Operation in Speed
Control.
Refer to 4.3.3 Trial Operation under Position
Control from the Host with the SERVOPACK
Used for Speed Control.
Refer to 4.4 Trial Operation with the Servomotor Connected to the Machine.