6-142
Increasing the Speed Reference Response (Feed Forward Control)
Use feed forward control to increase the responsiveness to speed references. This function is effective for
machines for which the ASR gain cannot be increased to a large value because doing so would result in vibra-
tions. There is also the additional effect of making the system less prone to overshoot. This function is valid
only in flux vector and open-loop vector 2 controls.
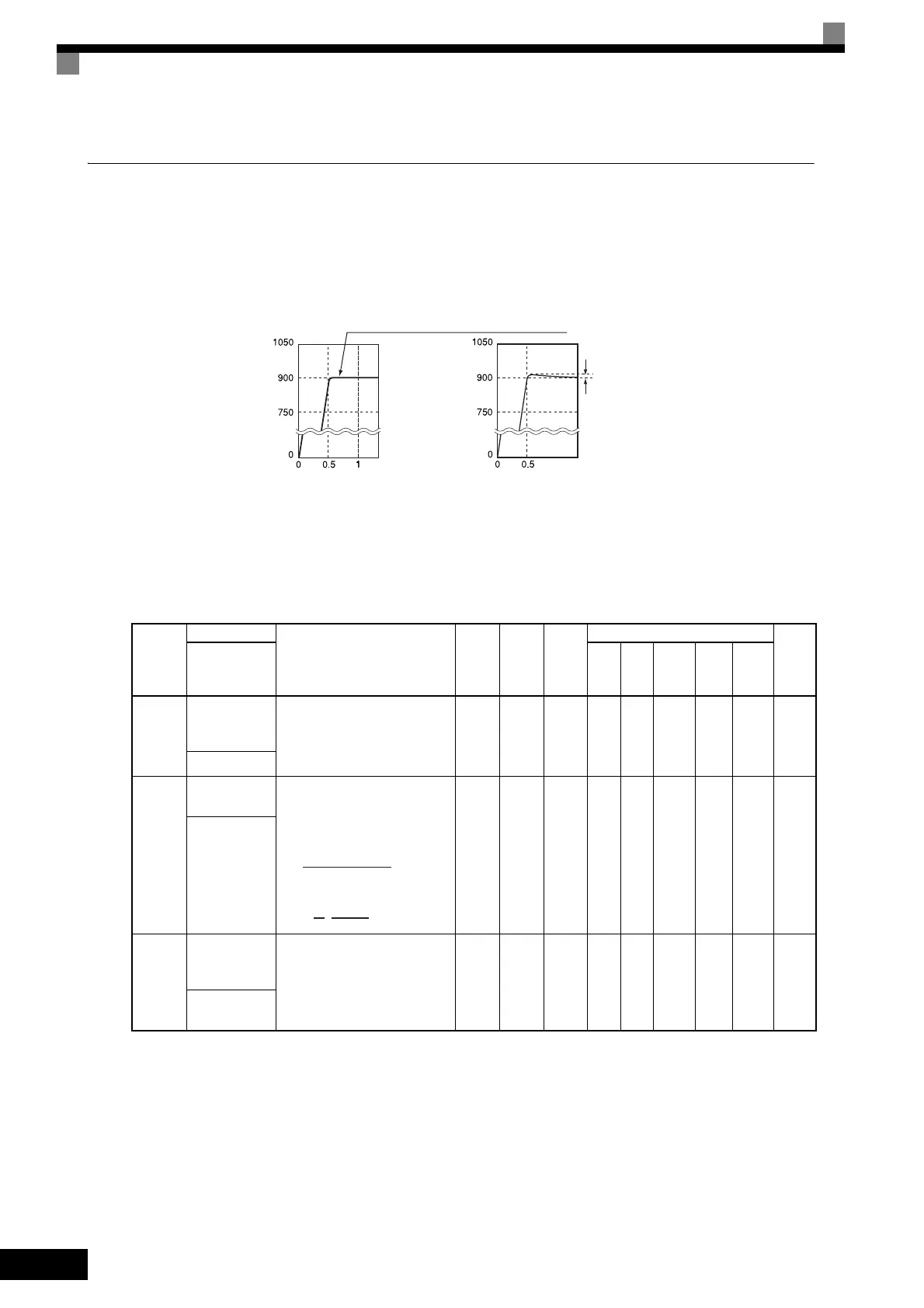
Fig 6.77 Overshooting Control Effect
Related Constants
* 1. When the control method is changed, the factory setting will change. The flux vector factory setting is given.
* 2. The factory setting depends on the Inverter capacity. The value for a 200 V Class Inverter of 0.4 kW is given.
Con-
stant
Number
Name
Description
Setting
Range
Factory
Setting
Change
during
Opera-
tion
Control Methods
MEMO
BUS
Regis-
ter
Display
V/f
V/f
with
PG
Open
Loop
Vector
1
Flux
Vec-
tor
Open
Loop
Vector
2
N5-01
Feed forward
control selec-
tion
Select the feed forward control.
0: Disabled
1: Enabled
0 or 1
0
*1
No No No No A A 5B0H
Feedfoward Sel
N5-02
Motor accelera-
tion time
Set the time required to acceler-
ate the motor at the rated torque
(T
100
) to the rated speed (Nr).
J: GD
2
/4, P: Motor rated output
However,
0.001
to
10.000
0.178
s
*2
No No No No A A 5B1H
Motor Accel
Time
N5-03
Feed forward
proportional
gain
Set the proportional gain for feed
forward control.
Speed reference response will
increase as the setting of N5-03 is
increased.
0.00 to
100.00
1.0 No No No No A A 5B2H
Feedfoward
Gain
Overshooting
Rotation
speed
(min
-1
)
Time(s)
Conventional speed control
Rotation
speed
(min
-1
)
Overshooting when acceleration completed
is being suppressed
Time(s)
Feed forward control
Overshooting control effect
2π x J [kgm
2
] x Nr [min
-1
]
ta =
60
x T
100
[N x m]
[s]
T
100
=
× 10
3
[N x m]
60
2π
x
P [kW]
Nr [min
-1
]