Subject to change · V 2.02.20 · EN
Page 46
www.argo-hytos.com
16.1.5 PDO Mapping
The sensor supports three to four transmit PDOs (TPDOs) to allow the most effective operation of the CAN-bus. The sensor does not
support dynamic mapping of PDOs, the mapping parameters are therefore only readable but not writeable.
Fig. 30 shows the principle of the mapping of objects from the OD in a TPDO, it corresponds to CiA DS-301, Chapter 9.5.4. Which
objects are mapped in TPDO 1 to 4 can be determined in the OD at index 0x1A00 to 0x1A03. The structure of the PDO mapping
entries is displayed in Fig. 29. Furthermore, each TPDO has a description of the communication parameters, such as transmission
type, COB-ID and possibly the event timer. The communication parameters for the TPDOs 1 to 4 are documented in OD at the index
0x1800 to 0x1803.
Byte LSB
Index (16 Bit) Sub-index (8 Bit) Object length in Bit (8 Bit)
CAN
ID Message
PDO Consumer (Actor)
PDO Consumer (Controller)
PDO Producer (Sensor)
Fig. 29: Basic structure of a PDO mapping entry
Fig. 28: PDO Consumer/producer relationship
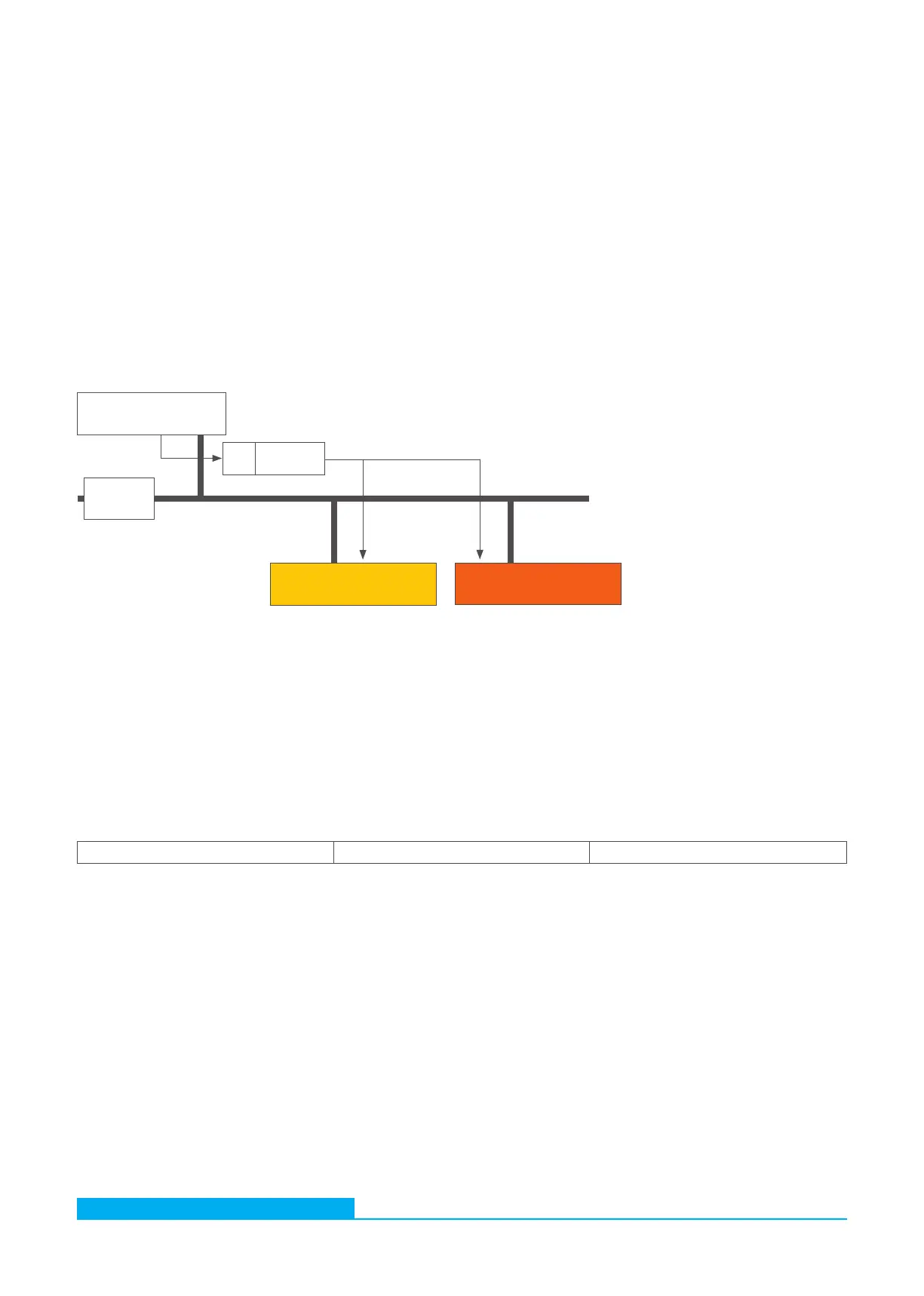
16.1.4 Process Data Object (PDO)
PDOs are one or more data sets mirroring up to 8 bytes of data in a CAN message from the object dictionary for the purpose of
transferring data quickly from a "producer" to one or more "consumers" (see Fig. 28).
Each PDO has a unique COB-ID (Communication Object Identifier), and is only sent from one single node; but may be received by
several nodes, and need not be acknowledged / confirmed.
PDOs are ideally suited to transfer data from sensors to the controller, or from the control system to actuators. PDO attributes of the
sensor at a glance:
› Sensor supports three transmit PDOs (TPDOs), but no RPDOs. The level sensors support four TPDOs.
› Data mapping in PDOs is fixed and cannot be changed
The sensor supports two different PDO transfer methods.
1. When using the event or timer-triggered method, transfer is triggered by an internal timer or event in the sensor.
2. In the SYNCH-triggered method, transfer is performed in response to a SYNCH message (CAN message from a SYNCH producer
without user data). The response using PDO is either sent on each received Synch, or after every 'n' SYNCH message received.