171
Type 8692, 8693
english
General Rules - Appendix
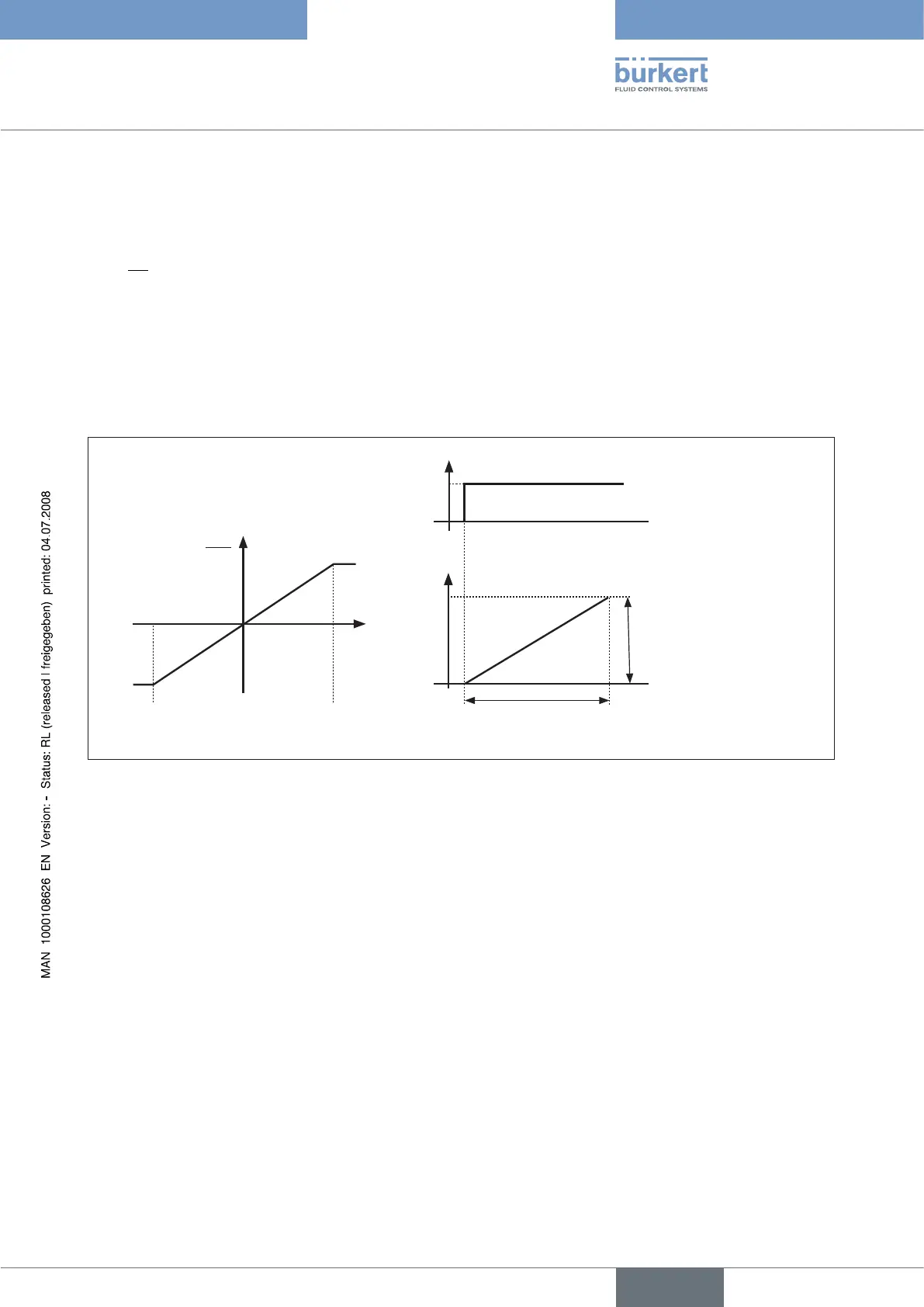
2.2 I Portion
Function:
(5)t d d X
i T
1
Y
∫
=
Ti is the integral action time or actuating time. It is the time which passes until the actuating variable has run through the whole
adjustment range.
Characteristic and step response of the I portion of a PID controller
Characteristic Step response
X
Xd
Ymax
Ymin
Adjustment range ΔY
Xd
dY
dt
Fig. 2: Characteristic and step response of the I portion of a PID controller
Properties
A pure I-controller completely eliminates the effects of any malfunctions which occur. It therefore has a favourable static behav-
iour. On account of its final actuating speed control it operates slower than the P-controller and has a tendency to oscillate. It is
therefore dynamically relatively unfavourable.