PMW20
147
Handling Method:
1) Check whether the communication line is normal.
2) Check the resistance of the communication line is 60 ohm.
3) Check whether the version of the software or set of parameters is correct.
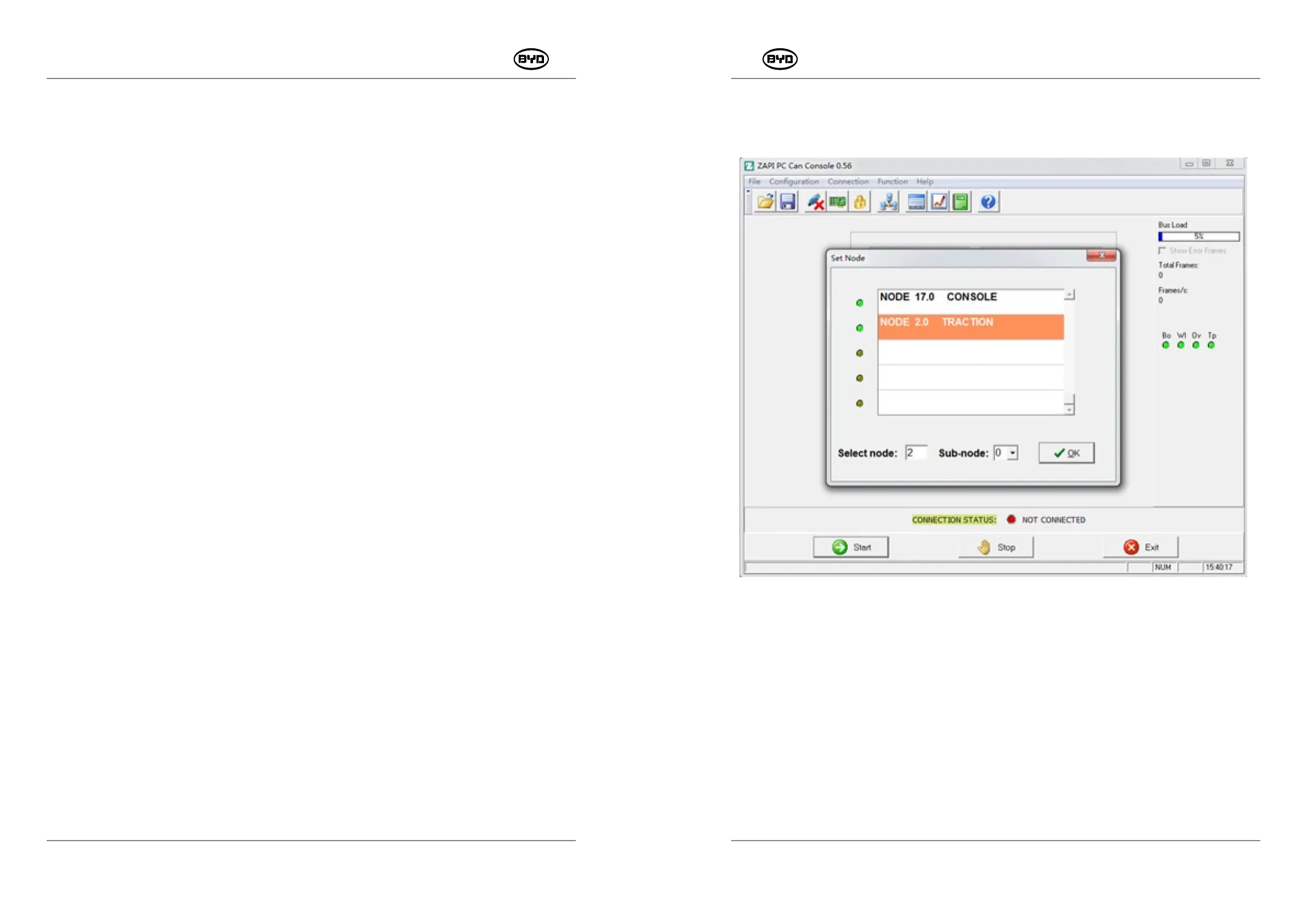
Use the “ZAPI CAN Console” software to check if you can connect to the site and check
the
program version information.
Site: NODE 2.0 means the driving controller
Connected to means correspondence program version number
PMW20
146
35. Error ID: 02A67
Error Description: NO CAN MSG
Cause A
It is a fault about CAN communication between the steering and traction.
Handling Method:
1) Turn off the power, stay all wires, and use the device at 200 ohm range to measure
whether the resistance between CAN H and CAN L is 60 ohm, if not go to the next
step.
2) Check whether the connections of the C10 CAN H wire and C5 CAN L wire of the
traction controller and the A4 CAN H wire and A3 CAN L wire of the monitor is normal.
3) Software settings and version information.
36. Error ID: 02A59
Error Description: SMARTDIVER KO
Cause A
The coil drive circuit cannot drive the load.
Handling Method:
The above failures occur when there is a problem with the contactor or valve coil.
Possible causes are:
1) The coil is short-circuited, open-circuited or disconnected.
2) Controller driver is short-circuited.
3) Coil plug failure or controller failure.
37. Error ID: 02A68
Error Description: WAITING FOR NODE
Cause A
If a controller connected to another controller can’t communicate smoothly under the CAN
communication network, it will be always in a waiting state until all the CAN
communication network works smoothly.
SM-PMW202020001-EN
SM-PMW202020001-EN