•
•
Lifting table
•
Roller/belt or chain conveyors (with mechanical stoppers OR safe contour light barriers)
•
2 x infrared data light barriers (each with 5 inputs and 5 outputs)
•
Connection of safe load detection sensors
•
Connection of Emergency Stop buttons
The following communication interfaces are available:
•
CANopen (connection of further CANopen participants, such as drive controllers or I/O units)
•
Ethernet (connection of operator terminals, for example)
9.5.Light pipe and visual indications
OTTO autonomous mobile robots (AMR) are equipped with light panels and pipes designed to signal
what an AMR is doing at any given time by changing the light color and flashing frequency—the light
pattern—to indicate a AMR's state or motion. Coupled with audible indications, AMRs will always make it
obvious the behavior that can be expected.
OTTO AMRs rely on audiovisual indications to warn nearby personnel of their presence, intent, and mode
of motion. Ensure that the AMR audio volume is at least loud enough that nearby personnel can detect
the presence of the AMR.
IMPORTANT
Note that light pipe patterns and audio indications are subject to change with software
updates.
See docs.ottomotors.com for up-to-date functionality.
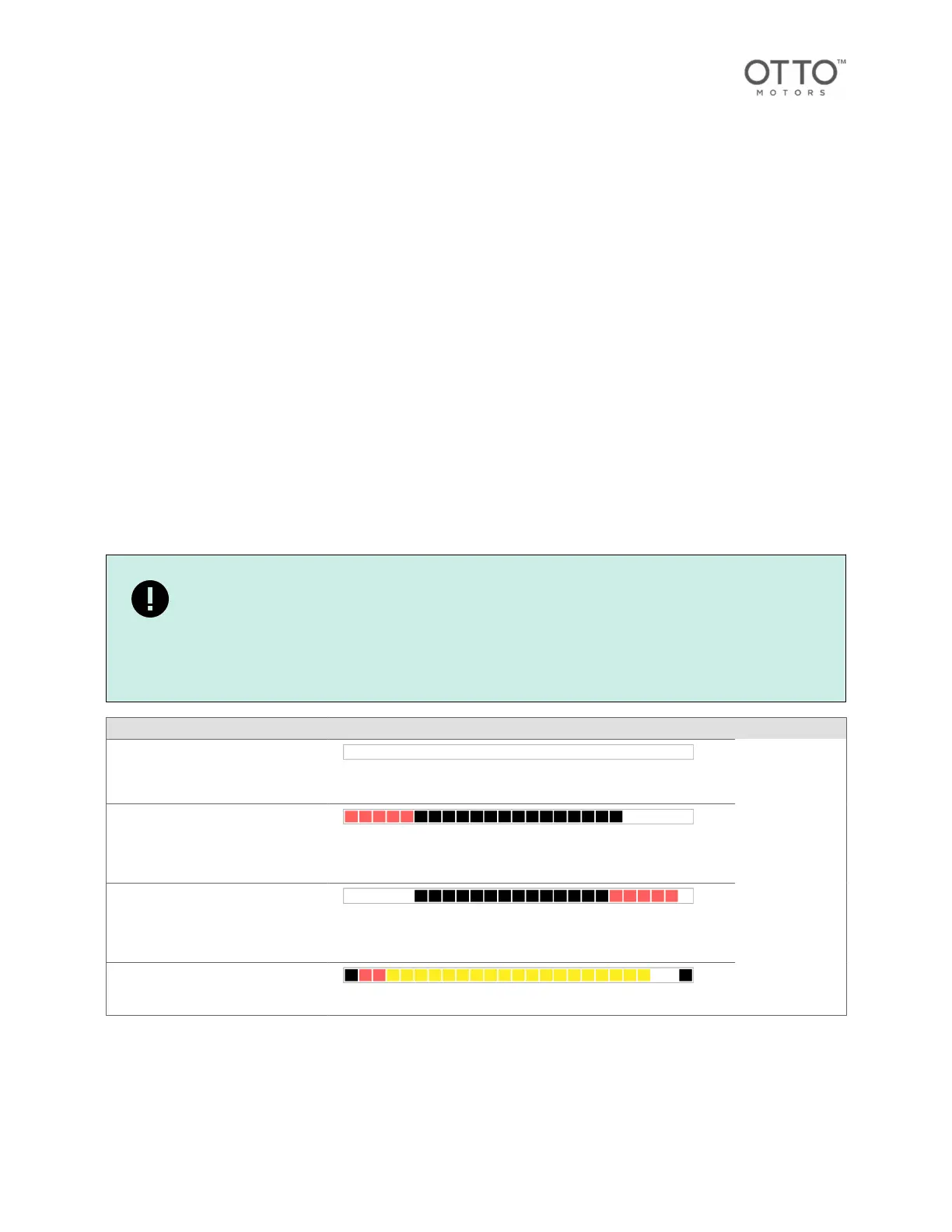
Name Description Visual indication
Starting up
The AMR is on
but has not
completed the
boot cycle.
Full solid red to full dull white
Normal travel
The AMR is
traveling
normally.
Front solid dull white
Rear solid red
Reversing
The AMR is
reversing.
Rear solid dull white in direction of travel
Front solid red with dull white
Turning
The AMR is
turning.
Side blinking yellow in turn direction
OTTO 600 - OMM-000117-A
© Clearpath Robotics Inc. 2024. All rights reserved. CLEARPATH and OTTO are trademarks of Clearpath Robotics Inc.
All other product and company names listed are trademarks or trade names of their respective companies. 31