TIP
Select X in the top-left of the window to cancel the move command.
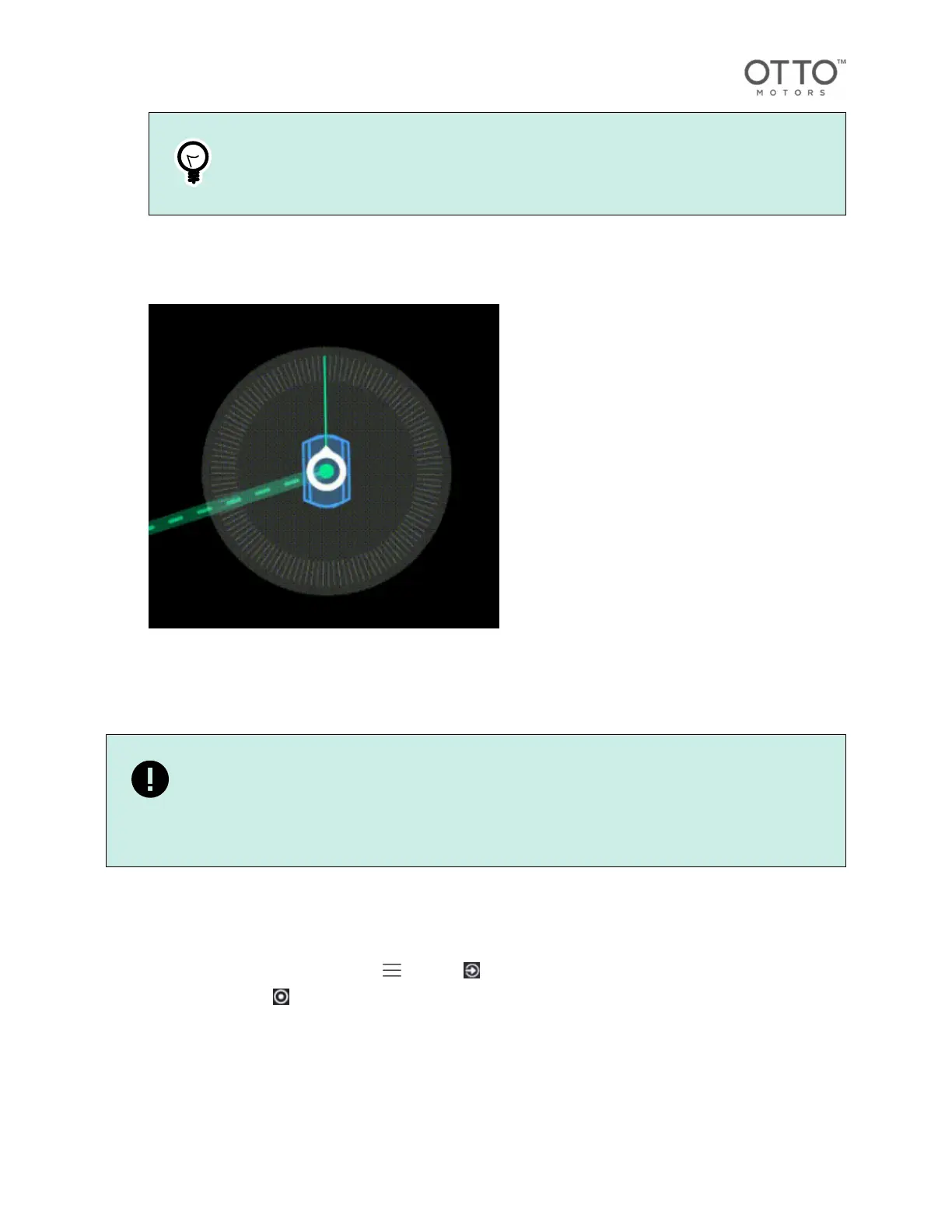
6. Select the location on the map to which the robot should drive.The joystick button will turn green
and the orientation circle will be displayed at the selected location on the map.
7. Move the green line inside the orientation circle to define the direction in which the front of the
robot should be directed when it stops at the selected location.
8. To send the AMR on its way, selectGo.
To stop the AMR at any time, selectStop.
Driving using Endpoints
IMPORTANT
Confirm that the localization of the AMR on the map is correct before engaging
Autonomous Mode. Failure to do so could result in the AMR entering Exclusion Zones or
ignoring map features, potentially resulting in damaging the AMR and/or property.
If at least one Endpoint is configured, an AMR can be sent directly to it where Tasks associated with the
Endpoint will be executed.
1. Launch OTTO App for the applicable AMR.
2. In OTTO App, selectMain Menu >Drive .
3. Select Endpoints .
4. Select an Endpoint from the list.
5. To send the AMR on its way, selectGo.
To stop the AMR at any time, selectStop.
OTTO 600 - OMM-000117-A
© Clearpath Robotics Inc. 2024. All rights reserved. CLEARPATH and OTTO are trademarks of Clearpath Robotics Inc.
All other product and company names listed are trademarks or trade names of their respective companies. 46