Safety circuits: minimum requirements for integration
48
HS-RC-C5E-TIN_05.fm
00/1010
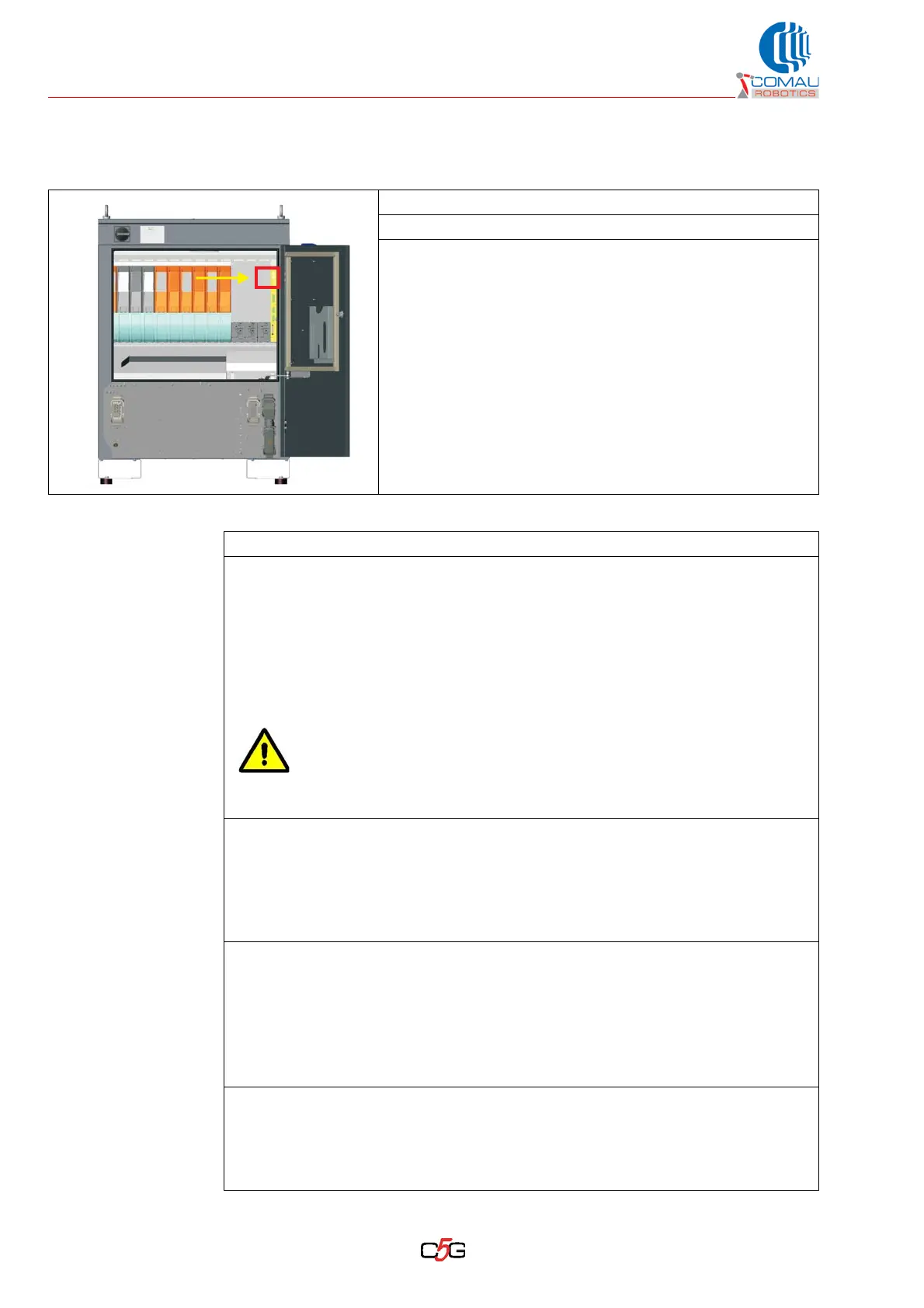
6.5 Safety stop: checking the stop circuit timer
Status: – Power off
Material: – Not necessary
Equipment: – Small flat blade screwdriver
Preliminary procedures / notes
C5G stop circuit category
– The safety stop is accomplished according to the categories specified in norm EN
60204-1 par. 9.2.2. The Emergency Entries (E-Stop), Gate (Auto-Stop) and
General Stop (Gen-Stop) are subjected to a safety stop time (refer also to
par. 6.6.2 Further details about the stop circuit signals on page 52).
In particular:
• category 1 (controlled stop) in LOCAL or REMOTE mode
• category 0 (immediate power cut-off) in PROGRAMMING mode.
The time set in the stop circuit timer shall be consistent with the
Robot model.
Evaluate carefully the stop times and adjust accordingly the machine
movable and fixed guard installation.
Functionality
– The time set in the stop circuit timer does not influence the Robot stopping time,
that is accomplished in the shortest time possible, depending on the Robot
model.
– The timer function is enabled in LOCAL or REMOTE mode, while in programming
mode, the Robot stopping is performed always according to category 0.
Usage limits
– Please note that zeroing or reducing the controlled stopping time may result
in:
• deviations from the expected path, due to the untimely applying of the
engine waiting brake.
• risk of probable stress for the Robot, for the engine waiting brake as well as
impacts due to the deviations from the expected path.
Consistency check
– The SDM module controls and ensures that both rotating selector switches
feature the same setting.
– The system software controls consistency between the time set for the selector
switches and the one specified in the Robot characterization file.