Parameter structure Keypad and display Parameter x.00
Parameter description
format
Advanced parameter
descriptions
Serial comms
protocol
Performance
Mentor MP Advanced User Guide 205
Issue Number: 4 www.controltechniques.com
6.1.5 Drive address
The drive only acts on messages received that contain a drive address if
the whole drive address or drive group address match the whole
address or the group address in the message, or if the address in the
message is 0 (i.e. a global message). Global or group addressing allows
data to be written to more than one drive with one command. The drive
does not give a response to a global or group write message. Although it
is possible to perform a global or group read, this would result in
messages crashing if more than one drive responds to the command.
6.1.6 Short commands
The following short commands can be used:
This is the same as requesting the value of the last parameter to be read
or written to. The response is the same as for a normal read.
This is the same as requesting the value of the parameter after the last
parameter to be read or written to. The response is the same as for a
normal read.
This is the same as requesting the value of the parameter before the last
parameter to be read or written to. The response is the same as for a
normal read.
Writes to the specified parameter at the same drive address as used by
the last read or write.
All the short commands will only read from the drive or write to the drive
if a valid address has already been sent to the drive in a previous
command. The address is registered as being valid once a read or write
command has been completed provide the address was valid for the
drive even if the parameter does not exist. The valid address is
cancelled if a message is received for a non-valid address or one of the
following occurs:
1. The command is aborted because a non-numerical value is received
in the drive address, menu or parameter numbers.
2. The command is aborted because the two digits for drive address 1
st
digit, drive address 2
nd
digit, menu number or parameter number are
not the same as each other.
3. EOT is received.
4. A character other than NAK, ACK, BS or STX is sent as a short
command.
5. A character other than ENQ is sent at the end of a read command.
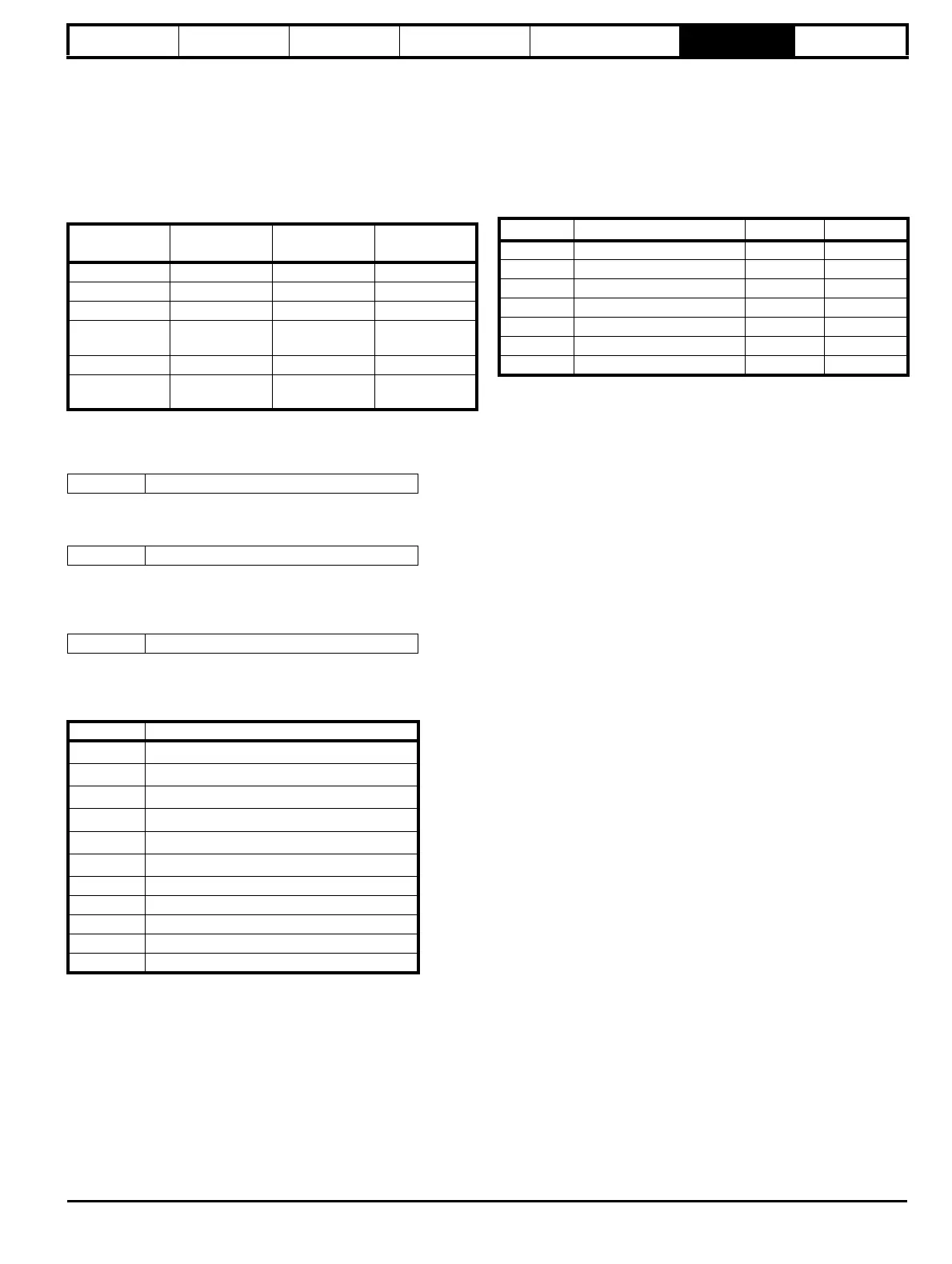
6.1.7 Summary of control characters
Drive address
Message
address
Command Action
7.8 7.8 Read Read
7.8 7.8 Write Write
7.8 7.0 Read Read
7.8 7.0 Write
Write with no
response
7.8 0.0 Read Read
7.8 0.0 Write
Write with no
response
NAK Not acknowledge (Ctl U)
ACK Acknowledge (Ctl F)
BS Back space (Ctl H)
STX Start of text (Ctl B)
M1
Menu number: 1
st
digit
M2
Menu number: 2
nd
digit
P1
Parameter number: 1
st
digit
P2
Parameter number: 2
nd
digit
D1
Data: 1
st
digit
D2
Data: 2
nd
digit
-
-
Dn Data: nth digit
ETX End of text (Ctl C)
Checksum
ASCII code Ctl code
STX Start of text 02 B
ETX End of text 03 C
EOT End of transmission 04 D
ENQ Enquiry 05 E
ACK Acknowledge 06 F
BS Back space 08 H
NAK Not acknowledge 15 U