Parameter structure Keypad and display Parameter x.00
Parameter description
format
Advanced parameter
descriptions
Serial comms
protocol
Performance
208 Mentor MP Advanced User Guide
www.controltechniques.com Issue Number: 4
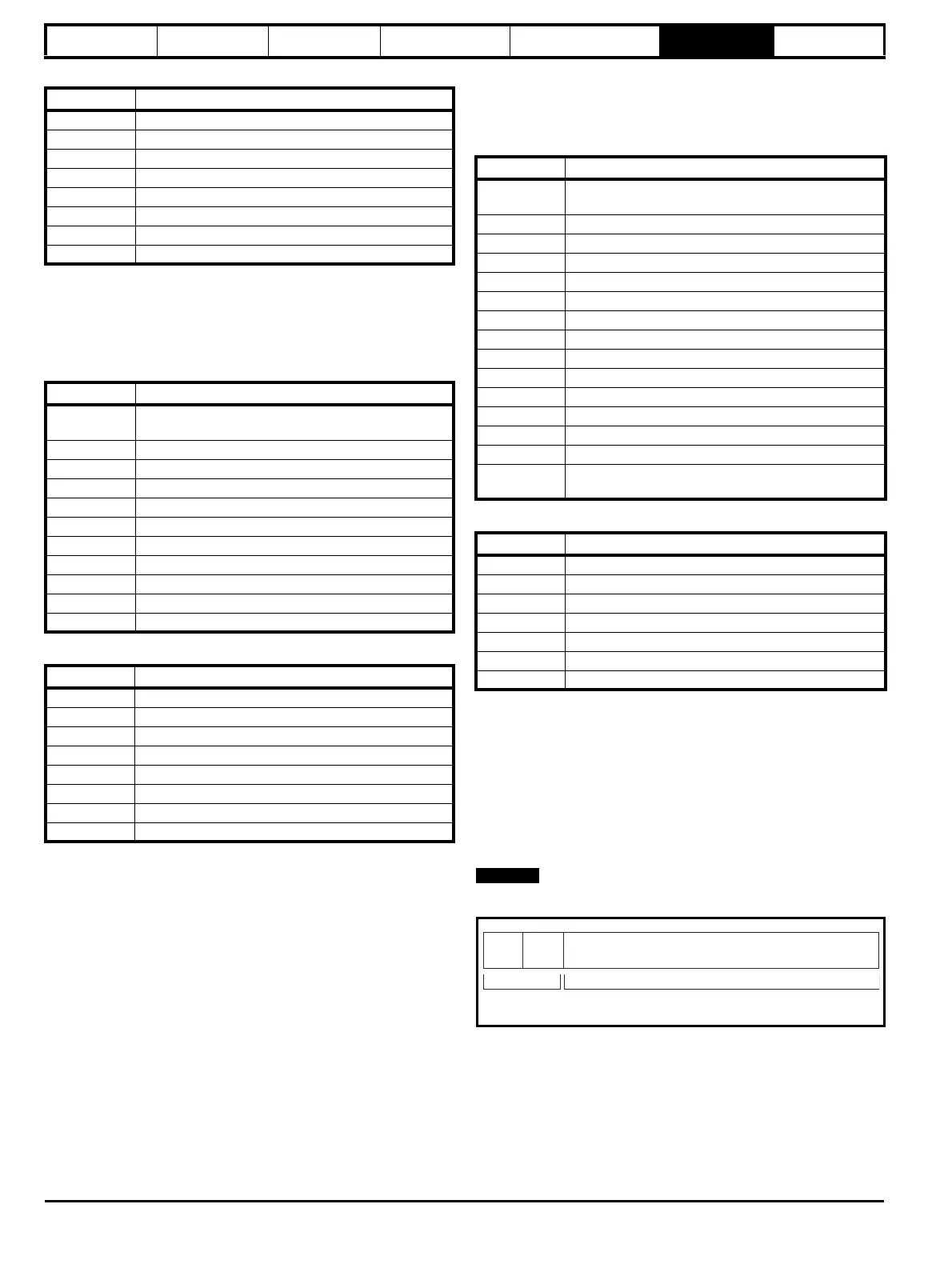
Table 6-4 Slave response
FC16 Write multiple
Writes a contiguous array of registers. The slave imposes an upper limit
on the number of registers which can be written. If this is exceeded the
slave will discard the request and the master will time out.
Table 6-5 Master request
Table 6-6 Slave response
FC23 Read/Write multiple
Writes and reads two contiguous arrays of registers. The slave imposes
an upper limit on the number of registers which can be written. If this is
exceeded the slave will discard the request and the master will time out.
Table 6-7 Master request
Table 6-8 Slave response
6.2.7 Extended data types
Standard MODBUS registers are 16bit and the standard mapping maps
a single #X.Y parameter to a single MODBUS register. To support 32bit
data types (integer and float) the MODBUS multiple read and write
services are used to transfer a contiguous array of 16bit registers.
Slave devices typically contain a mixed set of 16bit and 32bit registers.
To permit the master to select the desired 16bit or 32bit access the top
two bits of the register address are used to indicate the selected data
type.
The selection is applied for the whole block access.
Byte Description
0 Slave source node address
1 Function code 0x06
2 Register address MSB
3 Register address LSB
4 Register data MSB
5 Register data LSB
6 CRC LSB
7 CRC MSB
Byte Description
0
Slave node address 1 through 247,
0 is global
1 Function code 0x10
2 Start register address MSB
3 Start register address LSB
4 Number of 16bit registers MSB
5 Number of 16bit registers LSB
6 Length of register data to write (in bytes)
7 Register data 0 MSB
8 Register data 0 LSB
7+byte count CRC LSB
8+byte count CRC MSB
Byte Description
0 Slave source node address
1 Function code 0x10
2 Start register address MSB
3 Start register address LSB
4 Number of 16bit registers written MSB
5 Number of 16bit registers written LSB
6 CRC LSB
7 CRC MSB
Byte Description
0
Slave node address 1 through 247
0 is global
1 Function code 0x17
2 Start register address to read MSB
3 Start register address to read LSB
4 Number of 16bit registers to read MSB
5 Number of 16bit registers to read LSB
6 Start register address to write MSB
7 Start register address to write LSB
8 Number of 16bit registers to write MSB
9 Number of 16bit registers to write LSB
10 Length of register data to write (in bytes)
11 Register data 0 MSB
12 Register data 0 LSB
11+byte count CRC LSB
12+byte
count
CRC MSB
Byte Description
0 Slave source node address
1 Function code 0x17
2 Length of register data in read block (in bytes)
3 Register data 0 MSB
4 Register data 0 LSB
3+byte count CRC LSB
4+byte count CRC MSB
bit 15
TYP1
bits 0 - 13
Type select Parameter address
X x 100+Y-1
bit 14
TYP0