Menu 4
Parameter
structure
Keypad and
display
Parameter x.00
Parameter description
format
Advanced parameter
descriptions
Serial comms
protocol
Performance
58 Mentor MP Advanced User Guide
www.controltechniques.com Issue Number: 4
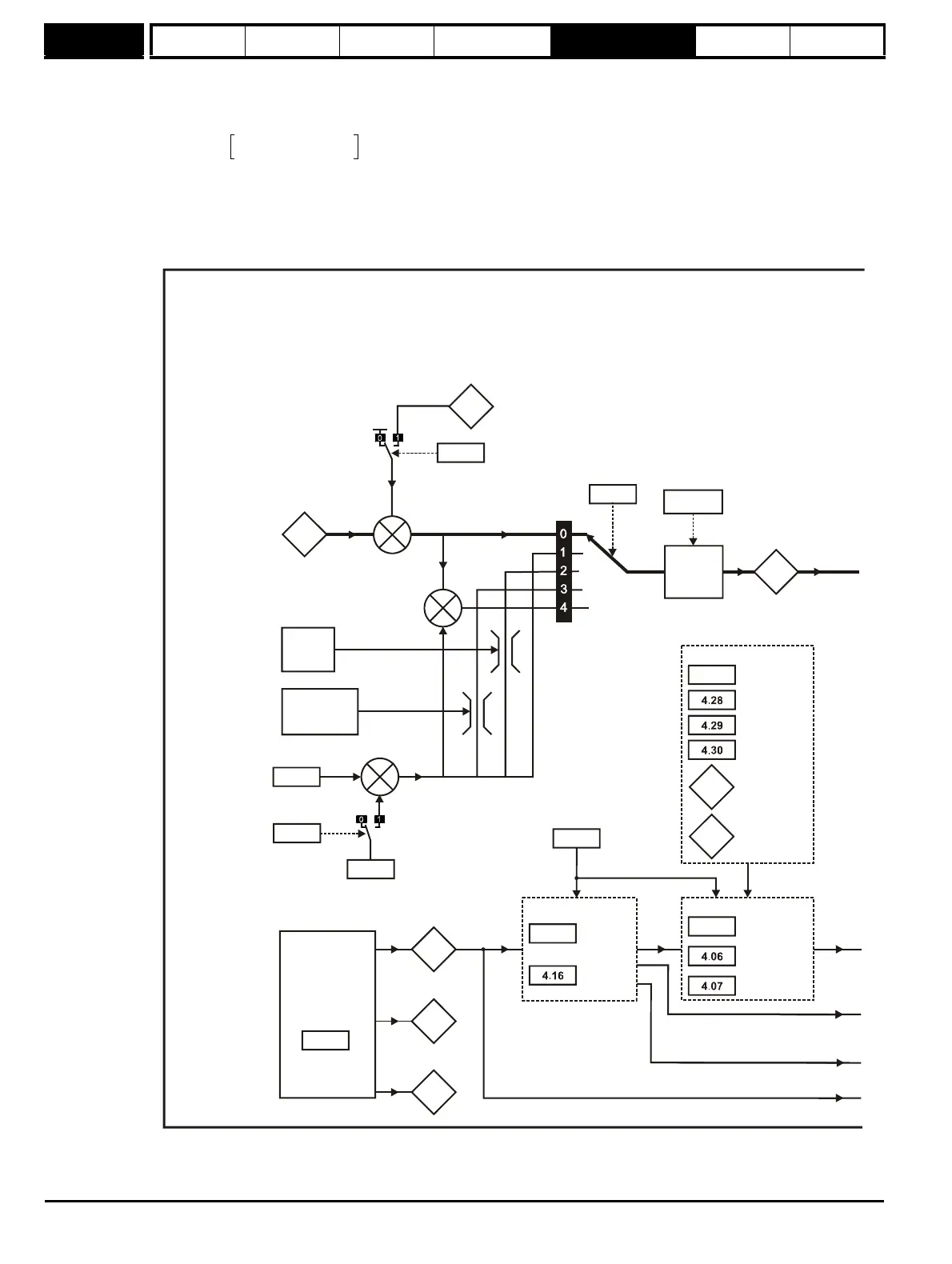
5.5 Menu 4: Torque and current control
MOTOR1_CURRENT_LIMIT_MAX is used as the maximum for some parameters such as the user current limits. The current maximum current limit
is defined as follows (with a maximum of 1000 %):
Where:
Motor rated current is given by Pr 5.07 {SE07, 0.28}
(MOTOR2_CURRENT_LIMIT_MAX is calculated from the motor map 2 parameters). The maximum current is 1.5 x drive rating.
Figure 5-4 Menu 4 logic diagram
CURRENT_LIMIT_MAX
Maximum current
Motor rated current
-------------------------------------------------------
100%×=
offset
Tor qu e
reference
Speed
over-ride
level
Coiler/uncoiler
speed over-
ride level
+
Torque mode
selector*
4.11
4.10
To r qu e
reference
offset
enable
+
+
+
User current
max scaling
+
4.22
2.38
Inertia
compensation
enable
+
Inertia
compensation
torque
Menu 5
magnitude
Current
magnitude