Parameter
structure
Keypad and
display
Parameter x.00
Parameter description
format
Advanced parameter
descriptions
Serial comms
protocol
Performance
Menu 3
Mentor MP Advanced User Guide 43
Issue Number: 4 www.controltechniques.com
This is the final speed demand at the input to the speed regulator formed by the sum of the ramp output and the hard speed reference (if the hard
speed reference is enabled). If the drive is disabled this parameter will show 0.0.
The speed feedback can be taken from the drive encoder port or tachometer or armature voltage or a position feedback module installed in any slot
as selected with Pr 3.26 {Fb01, 0.71}. Pr 3.02 {di05, 0.40} shows the level of the speed feedback selected for the speed controller. Display filtering is
active when this parameter is viewed with one of the drive keypads. The value held in the drive parameter (accessible via comms or an Solutions
Module) does not include this filter, but is a value that is obtained over a sliding 16 ms period to limit the ripple seen in this parameter value. The
speed feedback value includes encoder quantization ripple given by the following equation:
Ripple in Pr 3.02 {Fb01, 0.71} = 60 / 16 ms / (ELPR x 4)
Where ELPR is the equivalent encoder lines per revolution as defined below:
For example a 4096 line Ab type encoder gives a ripple level of 0.23 rpm.
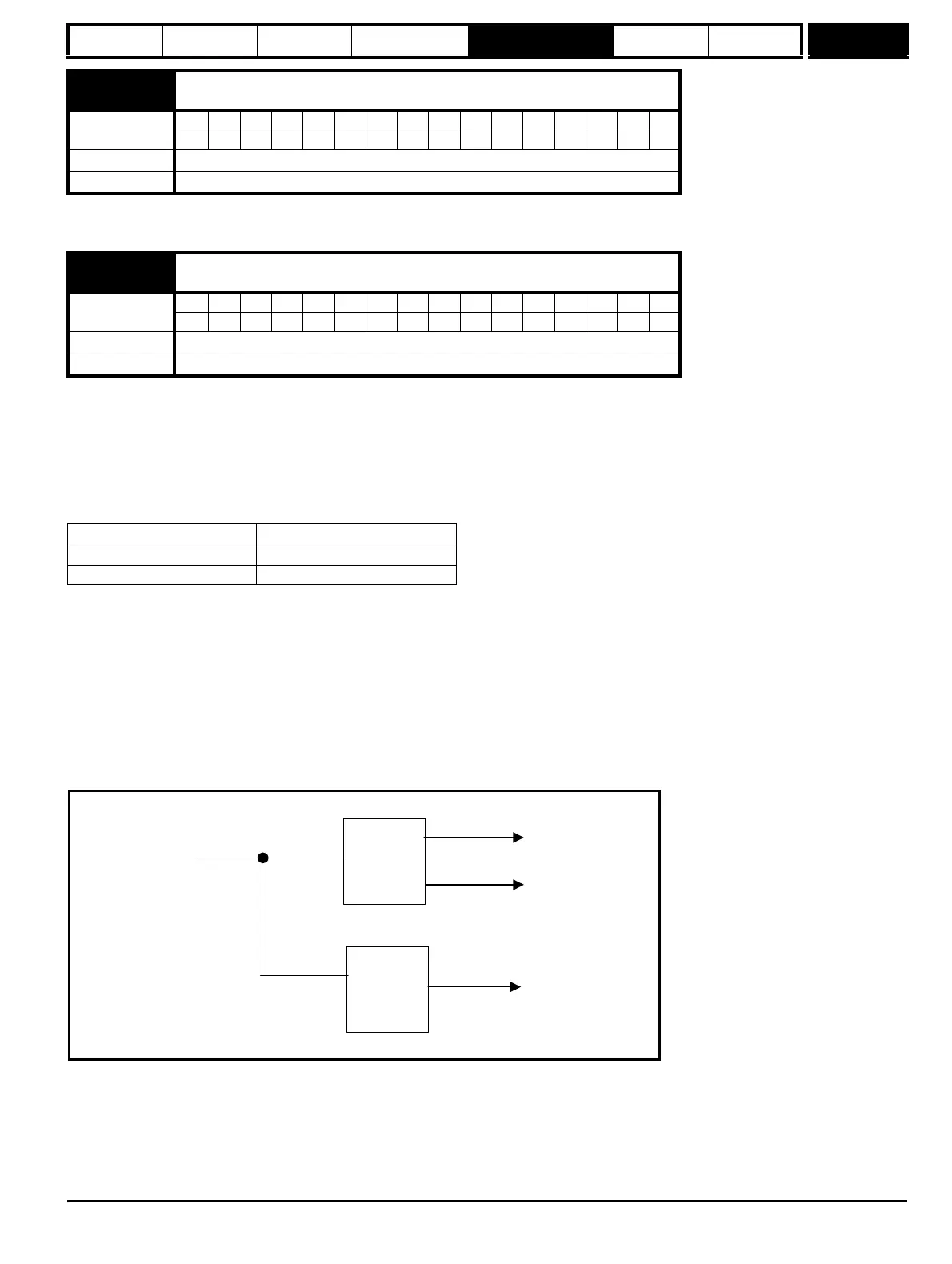
The 16 ms sliding window filter is always applied to the value shown in Pr 3.02 {Fb01, 0.71}, but this sliding window filter is not normally
applied to the actual speed feedback used by the speed controller or the drive encoder reference system (Pr 3.43 to Pr 3.46). The user may
apply a filter to the speed controller input and the drive encoder reference system input if required by setting Pr 3.42 to the required filter time. The
encoder ripple seen by the speed controller is given by:
Encoder speed ripple = 60 / Filter time / (ELPR x 4)
If Pr 3.42 is set to zero (no filter) the ripple seen by the speed controller and drive encoder reference system is given by:
Encoder speed ripple = 60 / 250 µs / (ELPR x 4)
The diagram above shows the filter arrangement. It should be noted that the same filtering is provided at the speed controller input and for Pr 3.02
{di05, 0.40} when the feedback is obtained from an Solutions Module, but the variable length window filter is controlled by Pr x.19.
It is not advisable to set the speed feedback filter too high unless it is specifically required for high inertia applications with high controller gains
because the filter has a non-linear transfer function. It is preferable to use the current demand filters (see Pr 4.12 or Pr 4.23) as these are linear first
order filters that provide filtering on noise generated from both the speed reference and the speed feedback. It should be noted that any filtering
included within the speed controller feedback loop, either on the speed feedback or the current demand, introduces a delay and limits the maximum
bandwidth of the controller for stable operation.
3.01
{di04, 0.39}
Final speed reference
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1 11111
Range ±SPEED_MAX rpm
Update rate 4 ms write
3.02
{di05, 0.40}
Speed feedback
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1 11111
Range ±SPEED_MAX rpm
Update rate 4 ms write
Position feedback device ELPR
Ab number of lines per revolution
Fd, Fr number of lines per revolution / 2
Filter
defined
by Pr
3.42
16ms
filter
From the drive
encoder port
Pr and
3.02
Pr
3.27
Speed
controller
Drive encoder
reference
system