Parameter
structure
Keypad and
display
Parameter x.00
Parameter
description format
Advanced parameter
descriptions
Serial comms
protocol
Performance
Menu 5
Mentor MP Advanced User Guide 91
Issue Number: 4 www.controltechniques.com
Increasing this parameter will allow the loop to track the current demand more closely. Setting the value too high will result in instability.
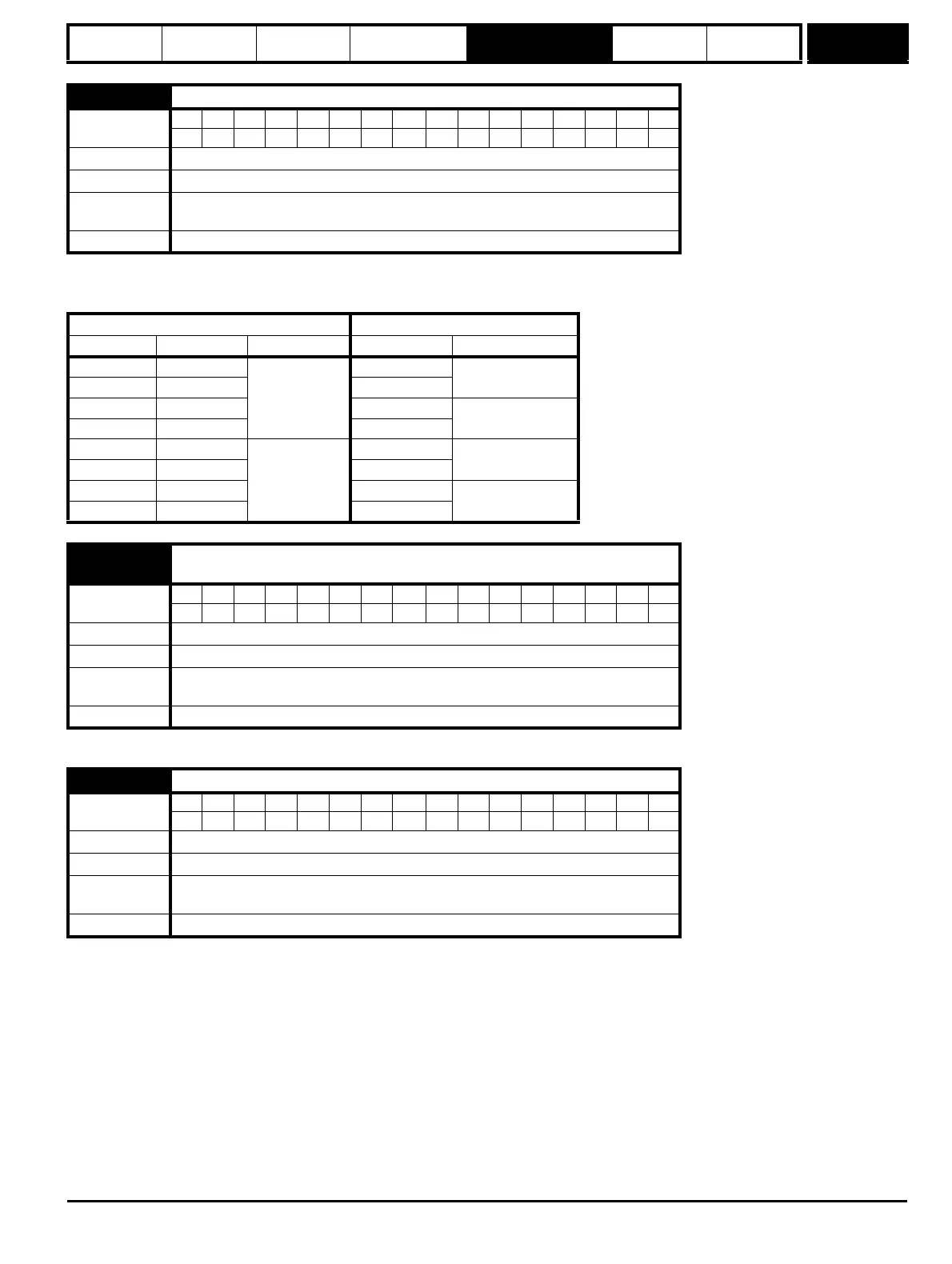
Table 5-6 Converting from Mentor II gains to Mentor MP gains
The maximum voltage the field controller is allowed to generate.
The nameplate rated field current is normally quoted for a cold field. At this level of current the machine is over fluxed which causes the back EMF of
the machine to be higher than expected, which in turn causes the estimated speed to be inaccurate.
The rotating autotune calculates the actual field current required to produce a 100 % field flux at ¼ rated speed with no load. This compensation
makes the estimated speed calculation more accurate. The rotating autotune sets this value in the range of 80 % to 100 %.
On motors with a high level of armature reactance the autotune level may need to be increased so the field is always fully fluxed.
5.72
Flux loop I gain
Coding
BitSP FI DETEVMDPNDRANCNVPTUSRWBUPS
2 111
Range
0 to 300.00
Default
60
Second motor
parameter
Pr 21.32
Update rate Background read
Mentor II Mentor MP
Pr 6.16 Pr 6.23 Pr 6.24 Pr 5.71 Pr 5.72
00
0
1.5
60
10 3
0 1 0.75
30
11 1.5
00
1
0.37
15
1 0 0.75
0 1 0.19
7.5
1 1 0.37
5.73
{SE11, 0.32}
Rated field voltage
Coding
BitSP FI DETEVMDPNDRANCNVPTUSRWBUPS
111
Range
0 to 500 Vdc
Default
Eur 360, USA 300
Second motor
parameter
Pr 21.23
Update rate Background read
5.74
Rated field compensation factor
Coding
BitSP FI DETEVMDPNDRANCNVPTUSRWBUPS
111
Range
0 to 100 %
Default
100 %
Second motor
parameter
Pr 21.35
Update rate Background read