ASRTU-EC16AP1TA EtherCAT Remote Communication Module Operation Manual
7-18
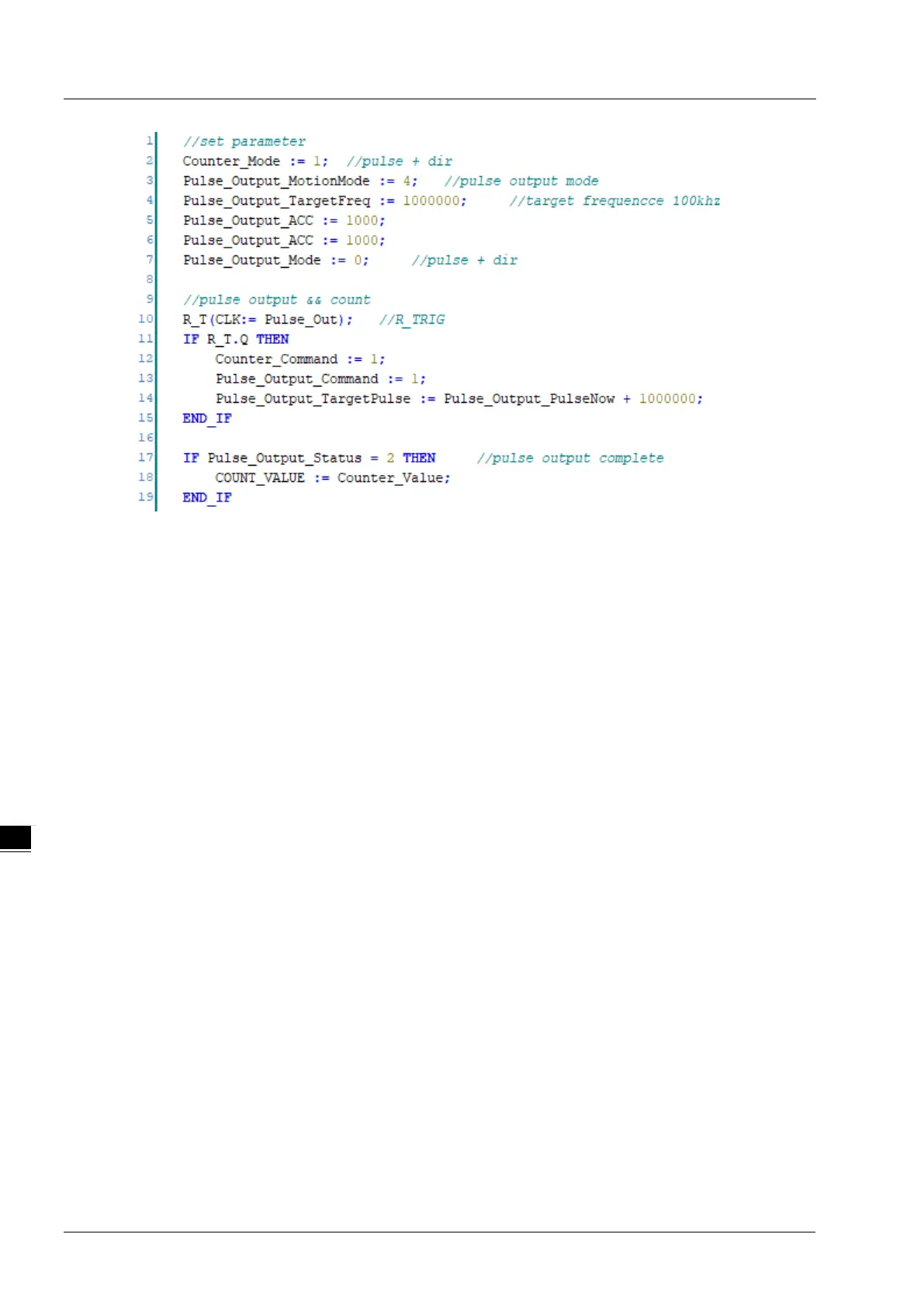
Description of lines in the program above:
Line 2: The counting mode for counter channel 1 is set to “pulse + direction”.
Line 3: The motion mode for pulse output channel 1 is set to the “absolute position output” mode.
Line 4: The target frequency for pulse output channel 1 is set to 200 kHz.
Line 5 & line 6: The acceleration time and deceleration time for pulse output channel 1 are set to
1000 ms.
Line 7: The output mode for pulse output channel 1 is set to “pulse + direction” mode.
Line 10: The variable Pulse_out in the program is set to TRUE.
Lines 12 & line 13: The values of command words for the high-speed counting and pulse output
are set to 1 to start the functions of the pulse output and high-speed counting.
Line 14: 1,000,000 plus the value of Pulse_Output_PulseNow (current pulse number) are assigned
to Pulse_Output_TargetPulse so as to output 1,000,000 pulses since Pulse_Output_TargetPulse
(Target pulse number) for ASRTU-EC16AP1TA is an absolute value.
When the pulse output is completed, the value of the Pulse_Output_Status variable becomes 2. At
the moment, you can check whether the number of pulses counted by ASRTU-EC16AP1TA’s
counter channel 1 is 1,000,000 or not.
After the pulse output is completed, please set the Pulse_Output_Command variable to 0 and then
change the Pulse_out variable from FALSE to TRUE so that you can output a second 1,000,000
pulses.