CT100 inverter Detailed instructions of function parameters
102
High speed
switching
frequency
Setting range: F04.02 ~
F00.06
The speed loop PI adjustment is used to output the torque current so that the
deviation of the speed command and the motor speed tends to zero.
F04.00/F04.03 proportional gain: when it increases, responsiveness will increase.
Generally, the larger the load, the larger the set value is. Whereas the set value
is too large, motor vibration occurs.
F04.01/F04.04 integral time: when it increases, responsiveness will decrease.
Whereas the integral time is too short, motor vibration occurs.
F04.02/F04.05 switching frequency: the inverter calculates the current
proportional gain and integral time according to the switching frequency.
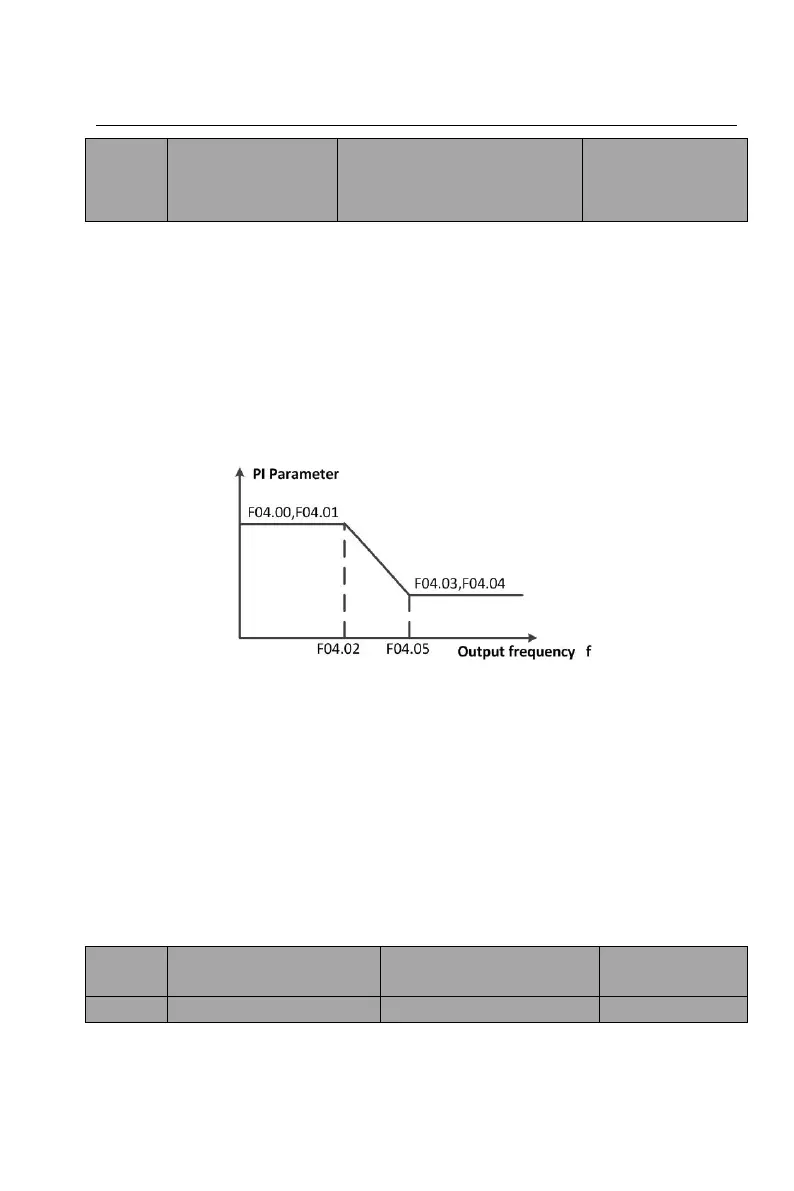
Figure 6-6 PI parameters and running frequency
When the running frequency is less than or equal to the low speed switching
frequency (F04.02), the proportional gain is F04.00 and the integral time is
F04.01;
When the running frequency is higher than the low speed switching frequency
(F04.02) and less than the high speed switching frequency (F04.05), the
proportional gain and the integral time are calculated according to the linear
relationship;
When the running frequency is equal to or higher than the high speed switching
frequency (F04.05), the proportional gain is F04.03 and the integral time is
F04.04.
VC slip compensation
factor
The VC slip compensation factor is used to adjust the slip frequency of vector
control and improve the speed stability of the system. Enlarge the parameter