6 Parameters
DC1 Frequency Inverter 10/12 MN04020003Z-EN www.eaton.com 93
6 Parameters
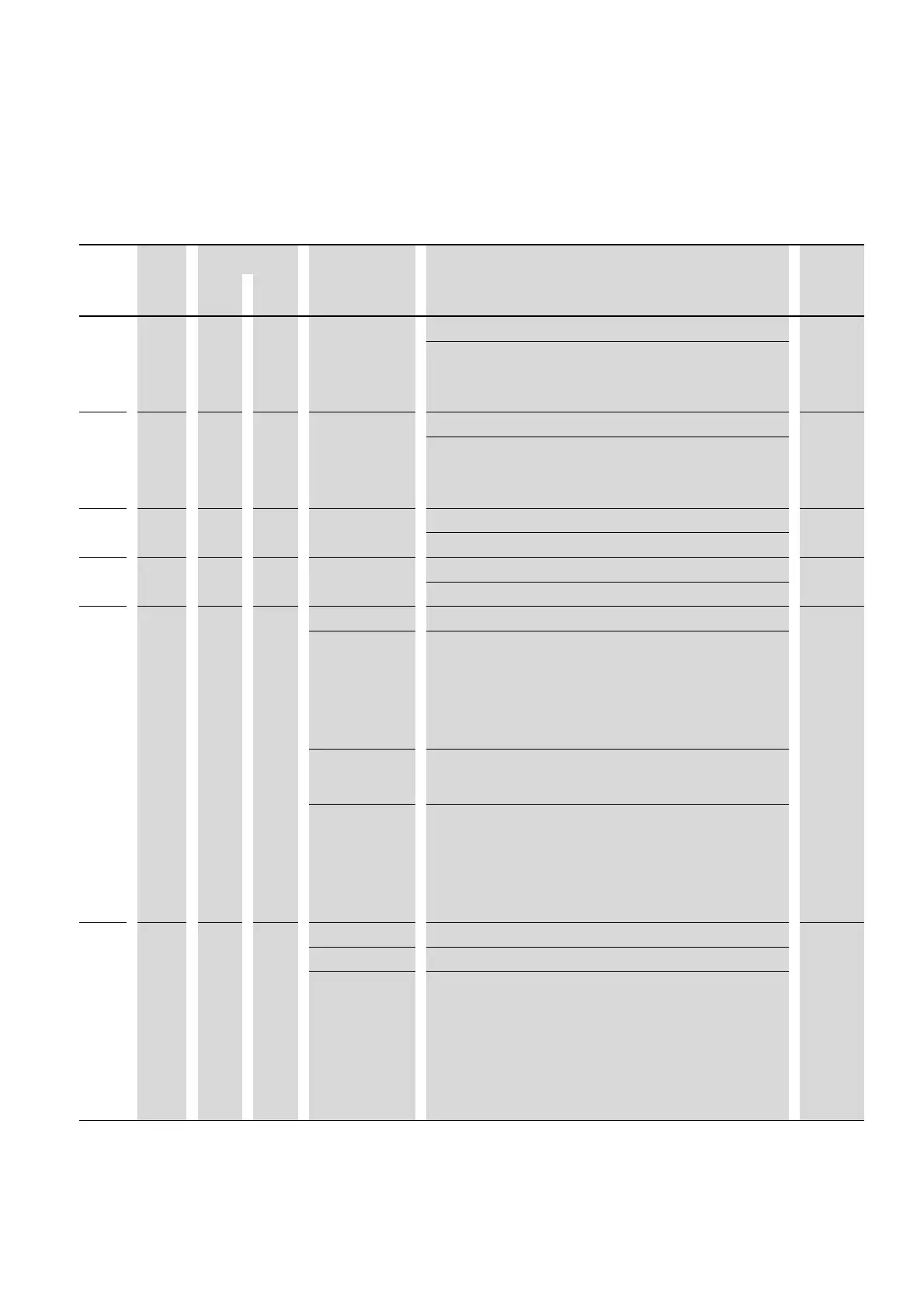
Table 12: Description list for DC1 parameters
PNU
ID Access rights Value Description DS
RUN ro/rw
P-01 129 ✓ rw Maximum frequency / maximum speed 50.0
P-10 = 0 → P-02 - 5 x P-09 → Hz
P-10 > 0 → P02 - 5 x P-09 x 60 s → min-1
The maximum output frequency / motor speed limit – shown in Hz or
rpm (if P-10 > 0).
P-02
130 ✓ rw Minimum frequency / minimum speed 0
P-10 = 0 → 0 - P-01 → Hz
P-10 > 0 → 0 - P01 → min-1
The minimum output frequency / minimum speed – shown in Hz or rpm
(if P-10 > 0).
P-03
131 ✓ rw Acceleration time (acc1) 5
0.1-600s (→ Figure 68, page 119)
P-04 132 ✓ rw Deceleration time (dec1) 5
0.1-600s (→ Figure 68, page 119)
P-05 133 ✓ rw Stop Function 1
0 Ramp, deceleration = dynamic braking
Deceleration time with the value set under P-04 (dec1).
If the energy that is fed back by the motor during dynamic braking is too
high, the deceleration time must be increased.
In devices with an internal braking transistor, the excess energy can be
dissipated with an external braking resistor (optional)
(→ Section 6.2.11.2, „Regenerative braking“, page132)
1 Free coasting
After the start enable (FWD/REV) is switched off or the STOP push-
button is pressed (P-12 and P-15), the motor will coast uncontrolled.
2 Ramp, quick stop = dynamic braking
Deceleration time 2 with the value set under P-24 (dec2)
If the energy that is fed back by the motor during dynamic braking is too
high, the deceleration time must be increased.
In devices with an internal braking transistor, the excess energy can be
dissipated with an external braking resistor (optional)
(→ Section 6.2.11.2, „Regenerative braking“, page132)
P-06
134 ✓ rw Energy optimization 0
0 Deactivated
1 activated
If this option is selected, the energy optimization function will attempt
to reduce the total energy consumed by the frequency inverter and the
motor during operation at constant speeds and with light loads. The
output voltage applied at the motor will be reduced.
The energy optimization function is intended for applications in which
the frequency inverter is run for specific periods at a constant speed
and with a light load, independently of whether the torque is constant
or varies.
 Loading...
Loading...








