Operation 2. TEACH Mode
44 TP1 Rev.5
(6)
Manually move the joint that needs origin alignment to its approximate 0 pulse
position.
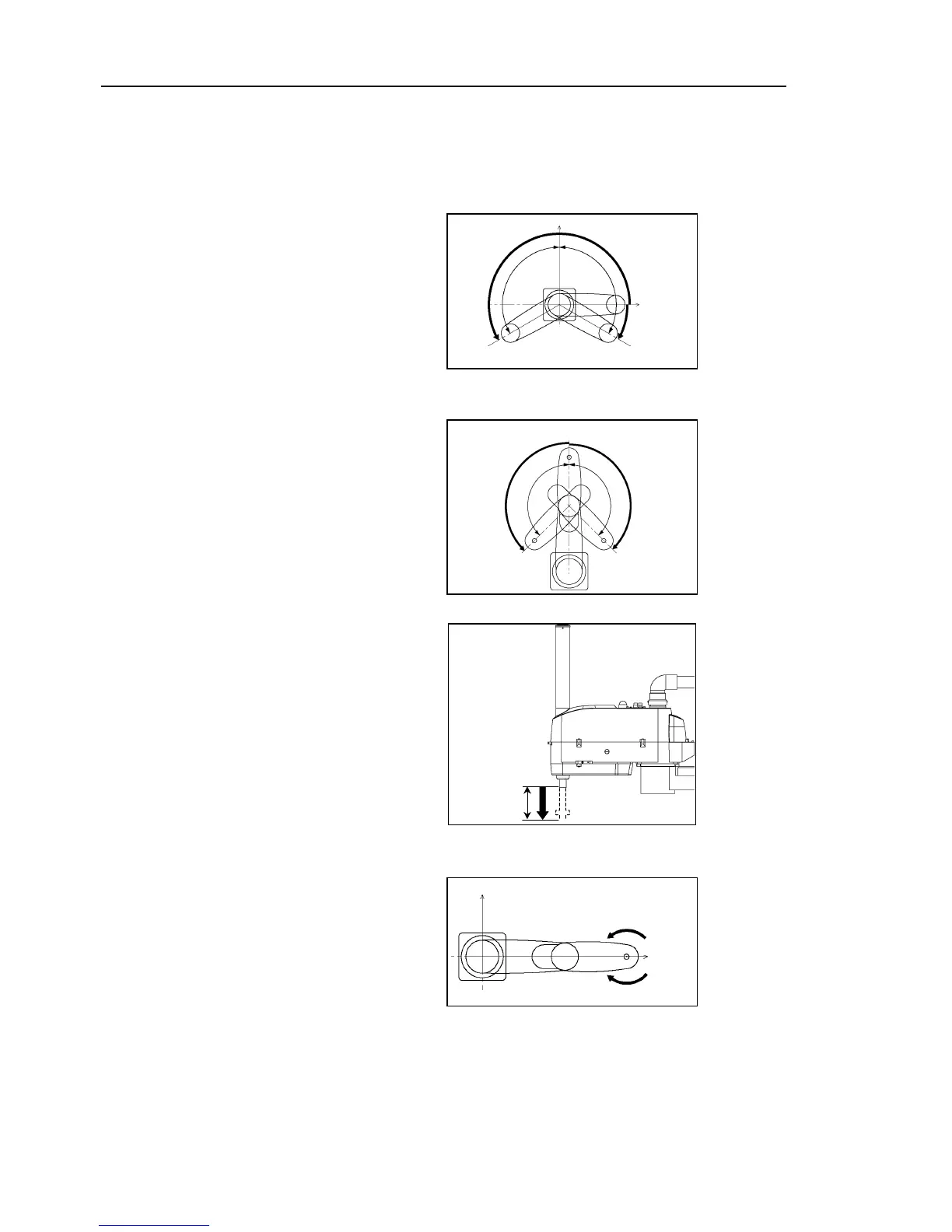
0 pulse position of Joint #1 : position aligned with X-axis in Manipulator coordinate
system
0 pulse
0 pulse position of Joint #2 : position where Arms #1 and #2 are in a straight line
(Regardless of the Joint #1 direction)
0 pulse
0 pulse position of Joint #3 : upper limit position in motion range
Upper limit:
0 pulse
0 pulse position of Joint #4 : position where the flat surface on the shaft faces towar