Chapter 7 Function for protection
63
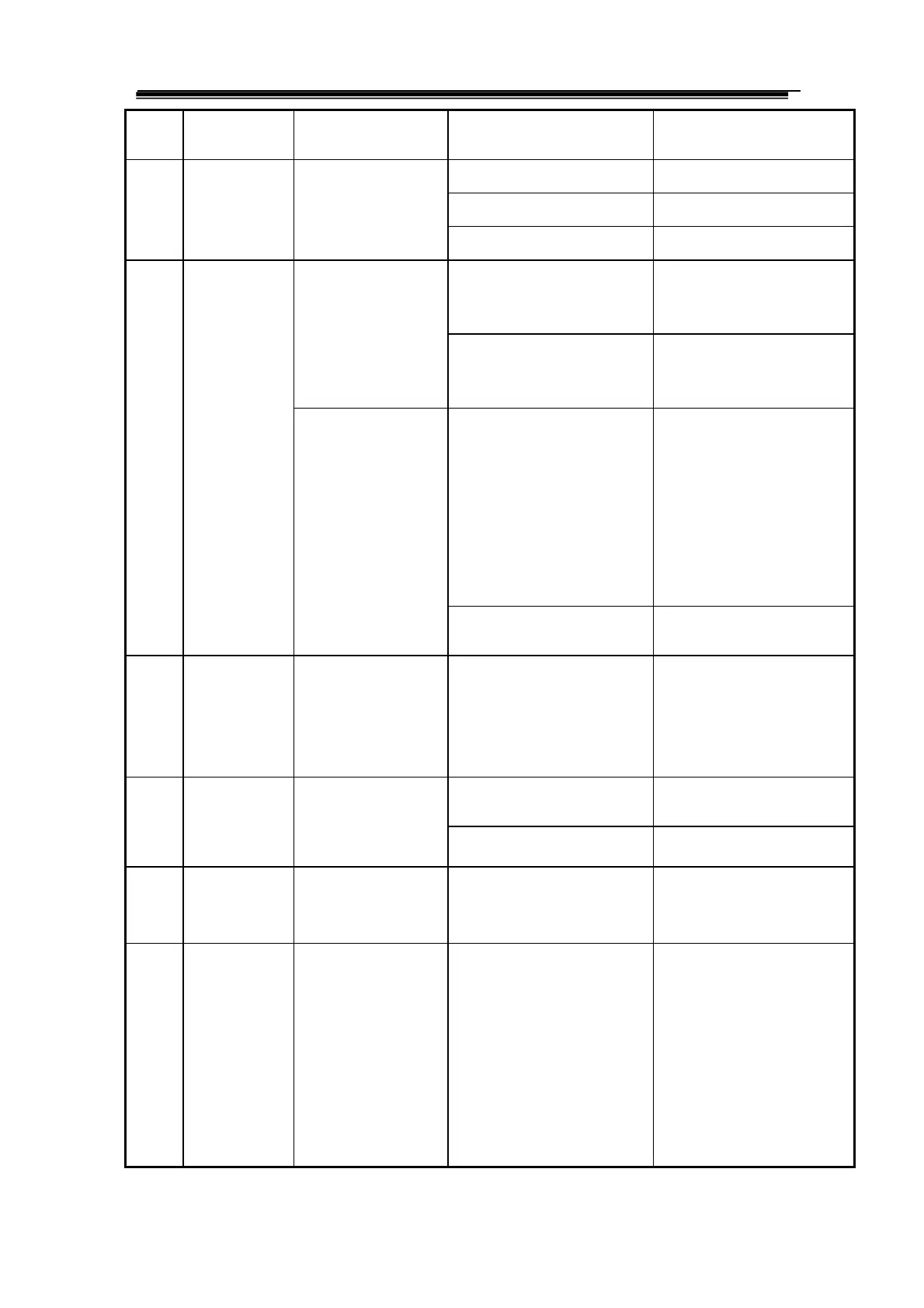
① Main circuit power supply
voltage is too high.
① Check the main power
supply.
Encoder is damaged. Change the motor.
Encoder connection is wrong. Check the connection.
Err-15
Encoder
counting fault
Earthing is not well done. Be grounded correctly.
Circuit board is at fault. Change the servo driver.
Occurring in switching
on control power
supply
Parameter setting is wrong. Set the parameter correctly.
Motor runs exceeding rated
torque for a long time.
① Check the load.
② Check the start-stop
frequency.
③ Reduce the torque limit
value.
④ Change the driver and
motor with the larger power
ones.
Err-16
Motor
overheating
Occurring in motor
running
Mechanical transmission is
not good.
Check the mechanical part.
Err-20
Data and
detecting
alarm of
EEPROM
EEPROM chip
damaged
① Chip or circuit board is
damaged.
① Change the servo driver.
② Driver model (parameter
PA01) must be set again
after repairing, then
restore the defaults.
Chip or circuit board is
damaged.
Change the servo driver.
Err-22
Zero-adjusting
error of
encoder
Parameter setting is wrong. Set the parameter correctly.
Err-23
Current
sampling fault
① Chip or circuit board is
damaged.
Circuit sensor is damaged.
① Change the servo driver.
Err-32
Encoder UVW
signals code
invalid
① UVW signals of encoder
are damaged.
② Cable is inferior.
③ Cable shielding is not
good.
④ Shielding ground wire is
not well done.
⑤ Encoder interface circuit
is at fault.
① Change the encoder
② Check the interface
circuit of encoder.