24
2-3-3 EtherCAT slave controller (ESC)
The EtherCAT slave communication controller chip ESC is responsible for processing EtherCAT data
frames, and uses the dual-port storage area to realize the data exchange between the EtherCAT master
and the local application of the slave. Each slave ESC shifts read and write data frames according to their
physical position on the loop
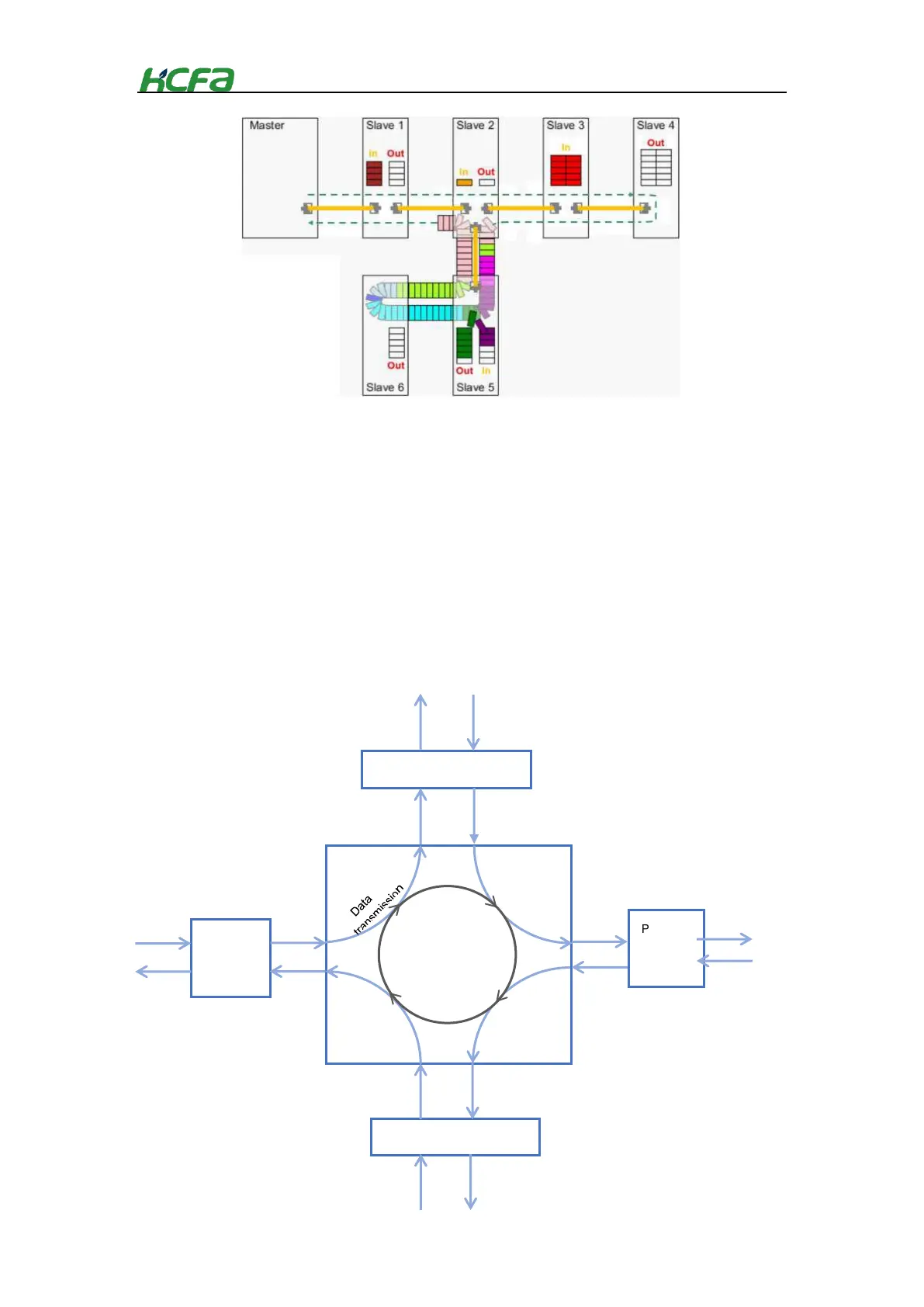
ESC has four ports, and each port can send and receive Ethernet data frames. The transmission of data
frames within ESC is fixed, as shown in the figure below. Typically, data enters ESC from port 0, and then
transmitted to port 3, port 1, port 2, port 0. If ESC detects that a port has no external link, it will
automatically close this port, and the data will automatically transmit to the next port. An EtherCAT slave
device uses at least two data ports, and multiple data ports can form a variety of physical topologies.
Take the HCFA module as an example, the EC coupler module uses three ESC data ports, and the
extension IO module uses two ESC data ports.
Physical
layer
Physical
layer
loopback
 Loading...
Loading...