22
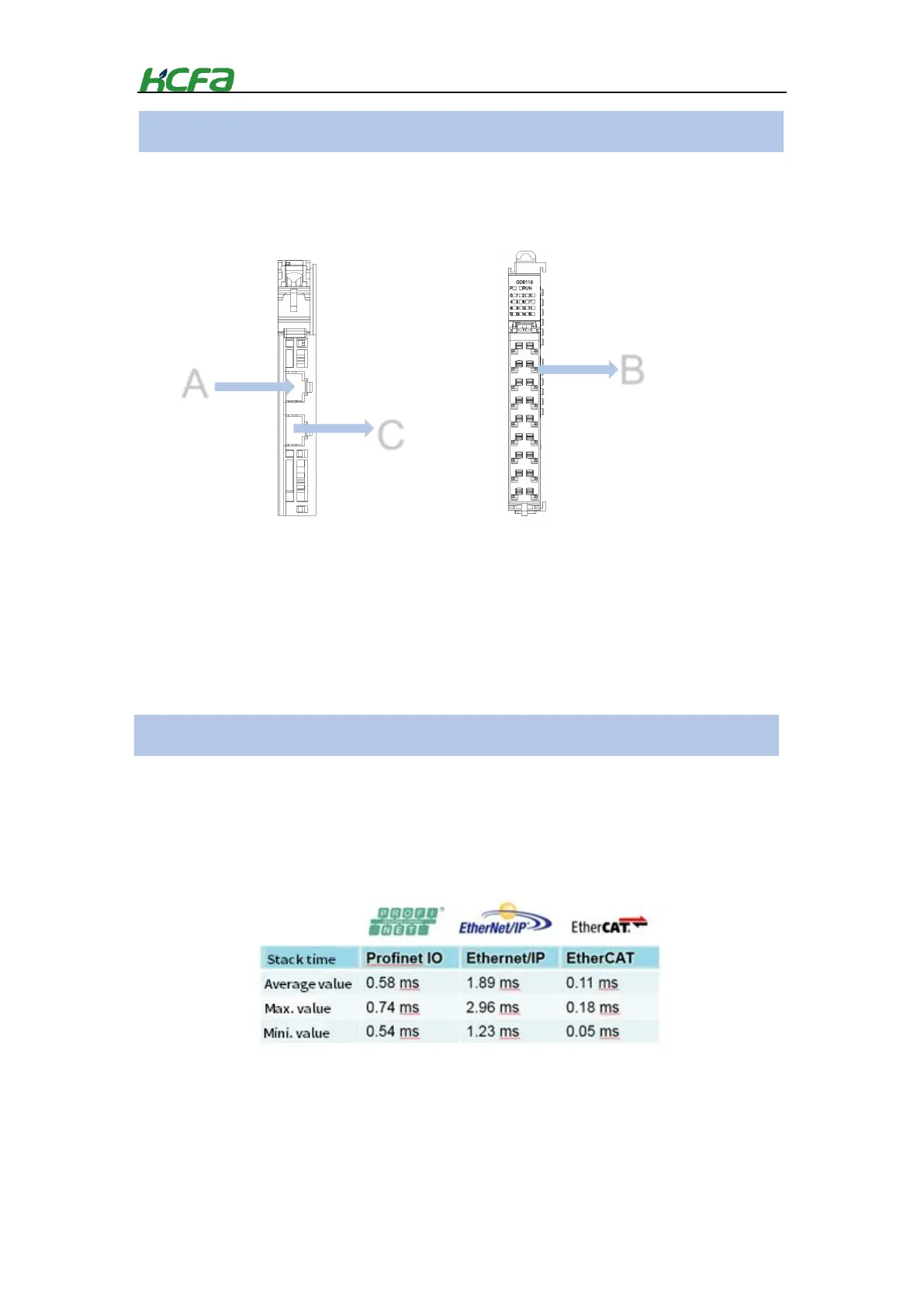
The direction of EtherCAT data frame transmission in an EC coupler depends on the ESC (EtherCAT
Slave Controller). Check the diagram below, the data frame transmission direction is A→B→C.
2-3-2 EtherCAT introduction
EtherCAT is chosen as the main bus communication protocol of the master for HCFA Q-series controllers.
EtherCAT is a real-time industrial Ethernet technology proposed by Beckhoff Automation in 2003. It is
also an Ethernet-based real-time industrial fieldbus communication protocol and international standard. It
has the characteristics of openness, high compatibility, and fast transmission speed, and supports
multiple device connection topologies. The slave node uses a dedicated control chip, and the master
station uses a standard Ethernet controller.
Excellent network performance. For 1500 devices, the throughput can reach 10kb/ms. The refresh
cycle of 1000 distributed I/O data is only 30μs, and the communication with 100 servo axes only
needs 100μs. Distributed clock technology ensures that the synchronization time deviation between
these axes is less than 1μs. Compared with other Ethernet-based fieldbus protocols, they have
good openness and compatibility.
Flexible topology. EtherCAT supports almost all topological structures, such as bus, tree, or star
type. Therefore, the bus structure from the fieldbus can also be used for the EtherCAT bus. For
EtherCAT, different topology structures will not affect the bus communication time (ignoring the
communication time of the signal in the network cable or optical fiber), and the user can design the
EtherCAT protocol characteristics
EC coupler signal transmission direction
 Loading...
Loading...