6. Troubleshooting and check
6-2
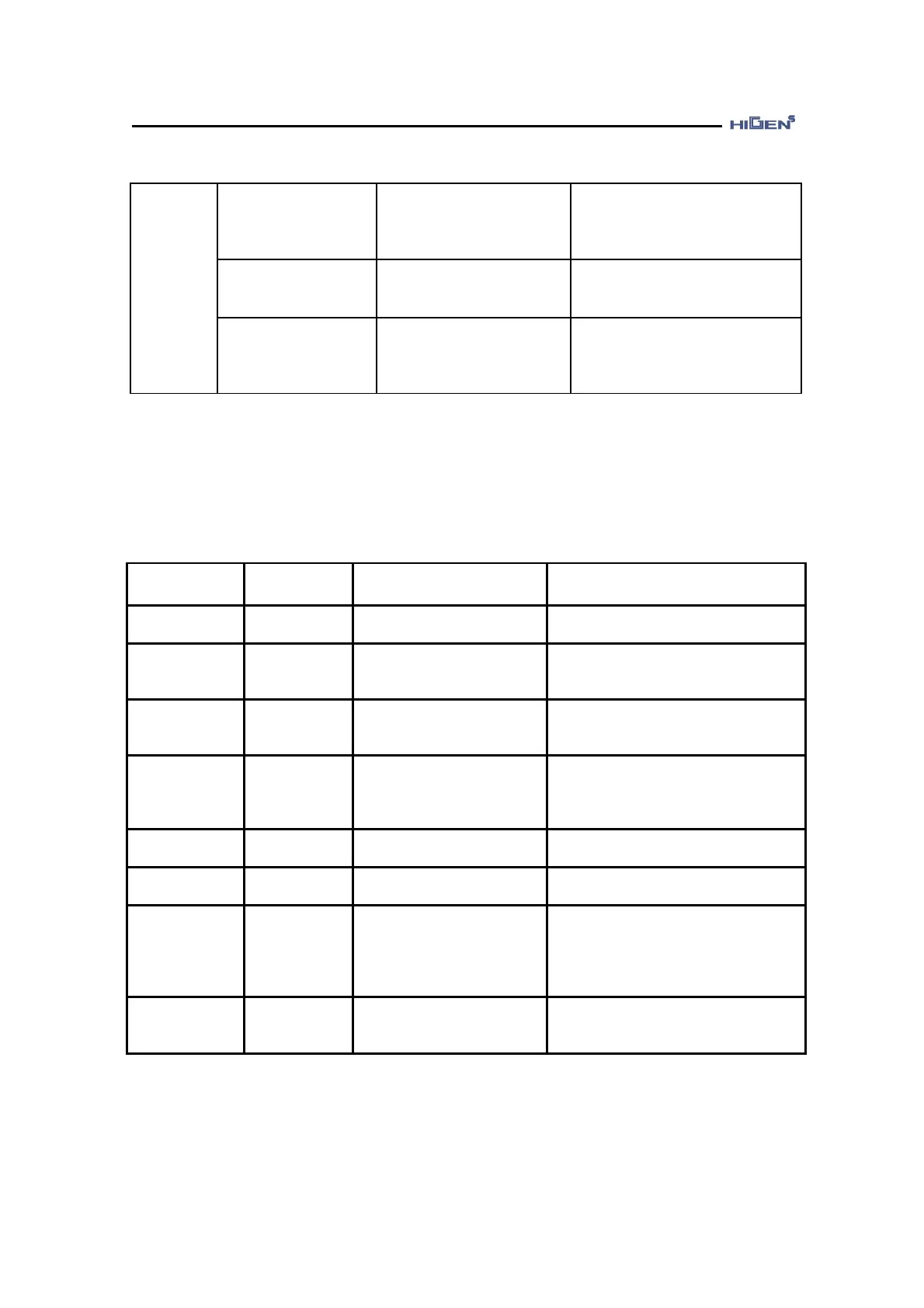
Abnormal
noise is
generated.
Check the screw condition
of the coupling and copper
core of the connection
part etc.
Check the bearing
vibration and abnormal
noise.
Parameter mis-
setting(Motor/encoder
ID, inertia ratio, gain,
TC)
Check the control
parameter.
Refer to parameter setting
method in chapter 3.
6.1.2. Servo drive
When an alarm occurs in servo drive and error signal output contact point (ALARM) goes OFF
and the motor is stopped by dynamic brake.
Turn external ESTOP
contact point input OFF.
Check external DC 24V power.
Check ESTOP contact point ON
status
Servo drive output terminal
(U, V, W) short circuit,
output over-current
Check output terminal wiring, re-
operate after resetting, replace drive
when O.C continues
Input over-voltage
(280V or above)
Regenerated resistance
burnt, Overload GD
2
Use input voltage of 230V or below
Replace brake resistance, increase
acceleration/deceleration time,
replace servo drive
Mechanical overload
Motor mis-wiring
Check load condition, check motor
and encoder wiring
Main power blocked when
SERVO is ON
Check 3 phase main power (R, S, T)
input condition
Mis-wiring of
motor and
encoder
Motor and encoder related
set value error, motor and
encoder mis-wiring,
encoder defect,
mechanical overload
Check motor, encoder, wiring and
set value, remove overload
Over-gain, parameter set
value error,
over gravity load
Adjust gain
Check parameter (P03-15, P03-16)
Remove over gravity load