5.8.4 Overtravel warning function
The over-travel warning function refers to the function of detecting A.9A0 (over-travel warning) when entering
the over-travel state during servo ON. When using this function, even if the over-travel signal is input
instantaneously, the servo drive can notify the upper device of the occurrence of a warning. This function is
only valid when the servo is ON. When the servo is OFF, even if it enters the overtravel state, the overtravel
warning will not be detected.
Even if A.9A0 occurs, the motor stop and the motion control action of the upper device will not be affected.
In case of over-travel warning, the next step (motion control and other commands) can still be executed.
However, according to the processing specifications and procedures of the upper-level device for warning,
the actions in case of over-travel warning may change (motion control stops or motion control does not
stop, etc.). Please confirm the specifications and procedures of the upper device.
In case of overtravel, the servo drive will stop the overtravel, so when A.9A0 occurs, the servo motor has
not reached the target position set by the upper device. Please confirm whether the shaft is stopped in a
safe position through feedback position.
This function is set by the following parameters.
No over-travel warning is detected.
Check out over-travel warning.
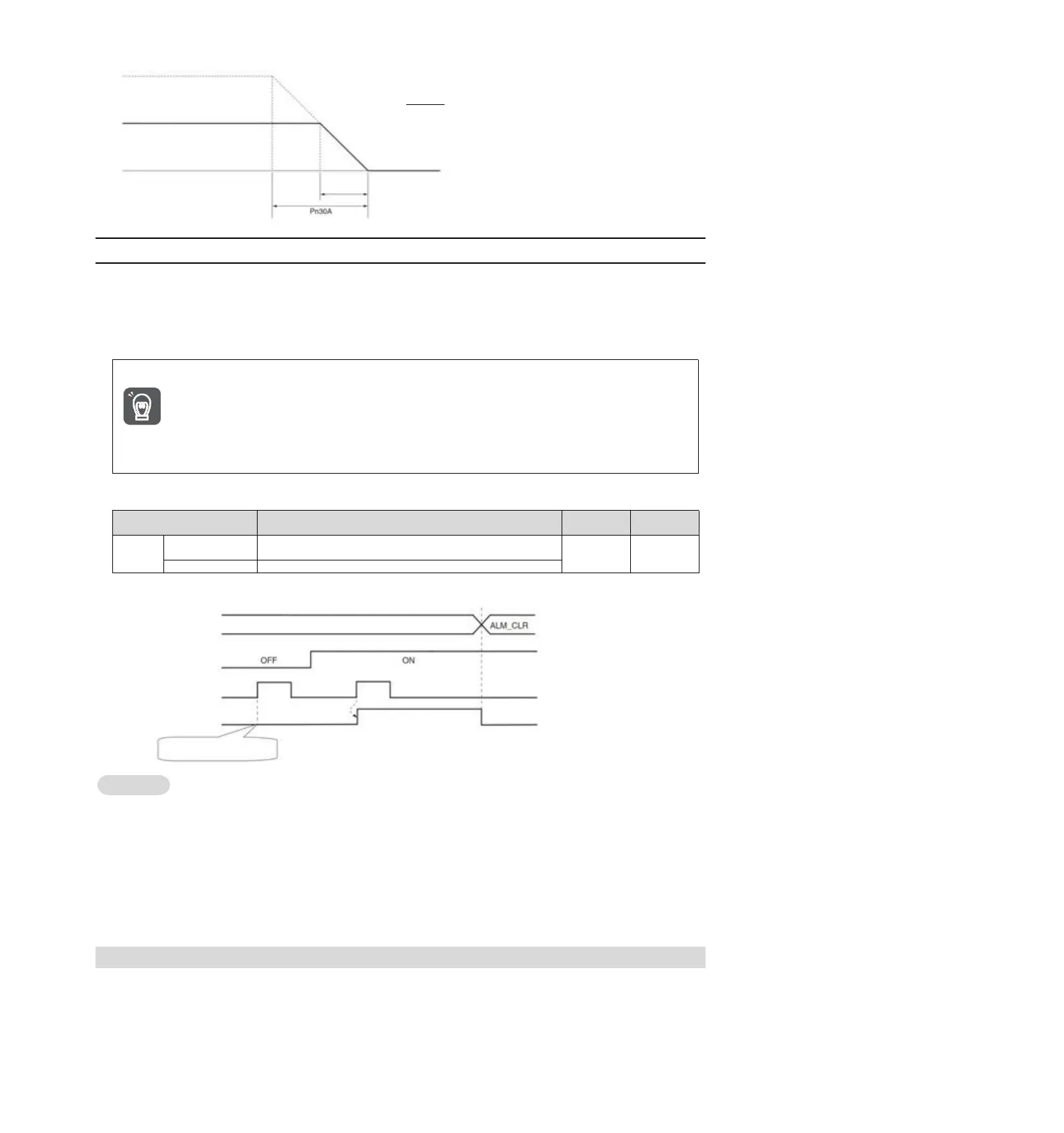
The timing chart for detecting warnings is as follows.
1. Warnings will be detected for overtravels in the same direction as the command.
2. Warning cannot be detected for overtravel in the direction opposite to the command direction.
For example, even if the N-OT signal is ON, a warning will not be issued during the movement under the
command of the positive direction.
3. In the absence of commands, warnings will be detected for overtravels in either the positive direction or
the reverse direction.
4. In the over-travel state, no warning will be detected when changing from the servo OFF state to the servo
ON state.
5. The release of the warning has nothing to do with servo ON/servo OFF and overtravel signal status. Use
the ALM_CLR command to release the warning.
6. In the over-travel state, when the warning is released by using the ALM_CLR command, the warning will
not be checked out until the over-travel state is released.
7. If soft limit is detected, over-travel warning will still be detected.
5.9 Brake
The brake is a component that maintains a fixed position when the servo-driven power supply is OFF so that
the movable part of the machine will not move due to self-weight or external force. The brake is built into the
servo motor with brake, please set it on the mechanical side.
Please use it in the situation shown below.
Actual deceleration time =
Actionspeed
Maximumspeed
x Deceleration Time (Pn30A)
Over-travel signal
(P-OT, N-OT signal)
Overtravel Warning
(A.9A0)
Warning is not detected due to
servo OFF state.